Préface
J’ai trouvé très intéressant le livre de W. Arnault, car il s’adresse directement aux jeunes pilotes qui débutent dans la compétition automobile avec très peu d’expérience sur la mise au point d’une voiture de course, monoplace ou prototype.
Conduire une voiture de compétition et savoir la régler pour en tirer le maximum, n’est pas chose facile quant on débute. Généralement vos concurrents ou amis deviennent subitement peu bavard quand on leur demande un conseil sur un réglage, d’autant qu’il varie d’un pilote à l’autre chacun ayant son propre style.
J’ai trouvé notamment très intéressant le passage sur les réglages d’amortisseurs, ils influent énormément sur l’équilibre d’un véhicule, et je pense que peu de personnes en tiennent compte, la majorité des gens étant braqués sur les flexibilités et l’anti-roulis.
Le paragraphe sur les épures de suspensions est aussi très intéressant, c’est la base même d’un bon réglage géométrique
W.Arnault que j’ai connu quand il est arrivé à la « promotion du sport automobile » chez Renault, où il était le responsable technique des formules de promotions, sous la houlette de Jacques Ferret, il a opéré à ce poste pendant plusieurs années. Il a une bonne expérience de la course automobile sur un plan technique.
Je pense que son livre qui est très complet sur la technique de réglage d’une voiture de course, sera le bienvenu pour tout les jeunes pilotes en devenir, qui ont besoin de quelques notions de mise au point, afin de pouvoir optimisé leur réglages pour tirer le maximum de leurs voitures de compétitions.
A.Serpaggi
SOMMAIRE
INTRODUCTION
GENERALITES
Principaux symboles
Définition des 3 axes de référence
Définition des différentes positions
Axe de devers interne
Direction (Épure de JEANTAUD)
LES PNEUMATIQUES
Rigidité
verticale
Rigidité transversale
Facteurs influents sur la rigidité de dérive
Structure du pneu
Largeur de jante
Pression
Charge portée
Sollicitations
Couple d'auto alignement
Poussée de carrossage.
LES ANGLES DU TRAIN AVANT
Angle de chasse
Déport au sol
Angle de pivot
Angle inclus
Angle carrossage
Parallélisme
Variation de parallélisme
Réglage de la répartition des charges au sol
Précautions d'usage à respecter
Ordre logique de contrôle
Ordre logique de réglage
LA SUSPENSION
Calcul de la raideur d'un ressort
Tableau de flexibilité
Calcul de la raideur des barres antiroulis
LES AMORTISSEURS
GÉOMÉTRIE DE SUSPENSION
Essieux rigides
Roues indépendantes
Essieux oscillants
Système Mac Pherson
Quadrilatères déformables
Droite de BOBILLIER
VARIATIONS GÉOMÉTRIQUES
Variations de voie
Variations de carrossage
Variation de pincement
INTRODUCTION
Après avoir découvert le sport automobile lors des 24 Heures du Mans 1961, puis fait des études à l’ETACA (devenue ESTACA maintenant) qui me permit de participer au Mans 1966-67, 1000 Km de Monthléry, Reims …..avec l’équipe CD ; J’intégrais le bureau d’études suspension-direction-freins de SIMCA en 1967 qui me permit de découvrir, entre autre, le fonctionnement des amortisseurs « multi-clapets » que l’on appelle aujourd’hui des « 6 voies », ensuite je rentrais chez Renault pour le lancement de la Formule Renault en 1971; la grande épopée du sport auto avec l’éclosion des Leclère, Serpagi, Laffitte, Cudini, Arnoux, Tambay, Pironi, Prost….et dans un autre domaine des De Chaunac -> ORECA, Lebris -> Danielson, « nanar »B.Mangé -> SODEMO…. !!!
Puis je rejoignais Ford pour le lancement de la Formule Ford 1984-89et de l’opération « Ford Jeunesse II - Rallye 1984-85, B.Bouhier pour une saison de rallyes en 1991 avec Alfa Roméo et Peugeot Talbot Sport pour le lancement du spider 905 en 1992-93.
Enfin je retournais dans l’industrie pour concevoir, développer, et industrialiser une suspension pneumatique pour ambulance de pompiers.
En 2001, 30 ans après l’avoir lancée, je suis revenu en Formule Renault à cause de (ou grâce à) Jean Philippe GRAND qui m’a fait sortir de ma campagne pour le suivre lors des essais d’hiver et de la première course.
P.Derode me demanda de le rejoindre en 2002 pour suivre la saison comme ingénieur de piste chez Pole-services.
2003 m’a permit de faire quelques essais avec RBA et 2004 -2006 , des esais de Formule Renault1600 ,de FR 2000 et puis F3 avec une écurie Luxembourgeoise.
Depuis 1966 et ma rencontre avec Robert Choulet chez CD, je me suis passionné pour le fonctionnement des suspensions et tout au long de ma carrière j’ai essayé d’engranger le maximum de documentation sur le sujet et de partager mes connaissances avec d’autres.
C’est d’abord, à la suite d’une conférence sur le circuit de magny-cours en 1972 qui réuni plus de 80 personnes de 21h à 3h du matin et dont l’auditoire était composé de mécaniciens, de pilotes et même de constructeurs de Formule Renault... que naquit l’idée de l’école de formation des mécaniciens de course de J.C.Leysalle ou j’assurais le cours de suspension.
Puis ce fut des articles « Technique et Compétition » avec Gilles Dupré (La berlinette échappement) sous le pseudo « W.G.ARDU »; le démarrage du GRETA du Creusot qui est un creuset de mécaniciens de course; et enfin le centre de formation CASTROL-ORECA.
Tout ceci nous amène à ce livre, réclamé gentiment avec insistance par Daniel CHARLES (Renault) .
J’espère qu’il vous plaira car je ne suis pas………un écrivain !
GÉNÉRALITÉS
Tout d’abord il ne faut pas oublier que le premier paramètre important est l’opérateur humain et que celui-ci fonctionne à partir d’informations visuelles, auditives et sensorielles.
Ceci étant posé, et devant rester en mémoire, nous allons passer en revue les principaux paramètres qui influent sur le comportement.
Nous allons voir quelles sont les principales caractéristiques des véhicules qui interviennent sur son comportement.
Nous nous intéresserons dans cette partie à deux caractéristiques du guidage par le sol.
-La suspension
-La direction.
DÉFINITION DES PRINCIPAUX SYMBOLES ET TERMES EMPLOYÉS
G : Centre de gravité de l'ensemble du véhicule.
Gc: Centre de gravité de la masse suspendue.
M: Masse du véhicule.
m: masse suspendue.
m1.1‑m1.2.: Masses non suspendues (m1.1 = Av gauche) (m1.2 = Av droit)
(m2.1 = AR gauche) (m2.2 = AR droit).
x: avance
y: ballant
z: rebondissement
θ: (théta) angle de devers.
V: voie du véhicule.
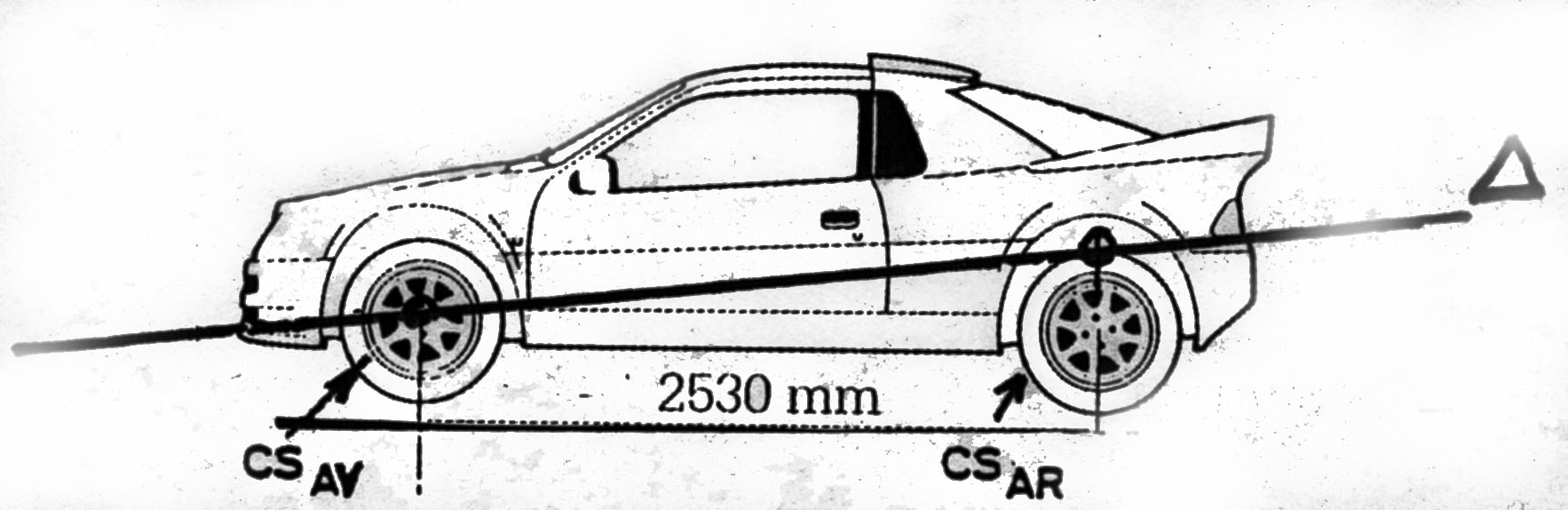
V1‑V2 : voie avant ‑ voie arrière : (fig01)
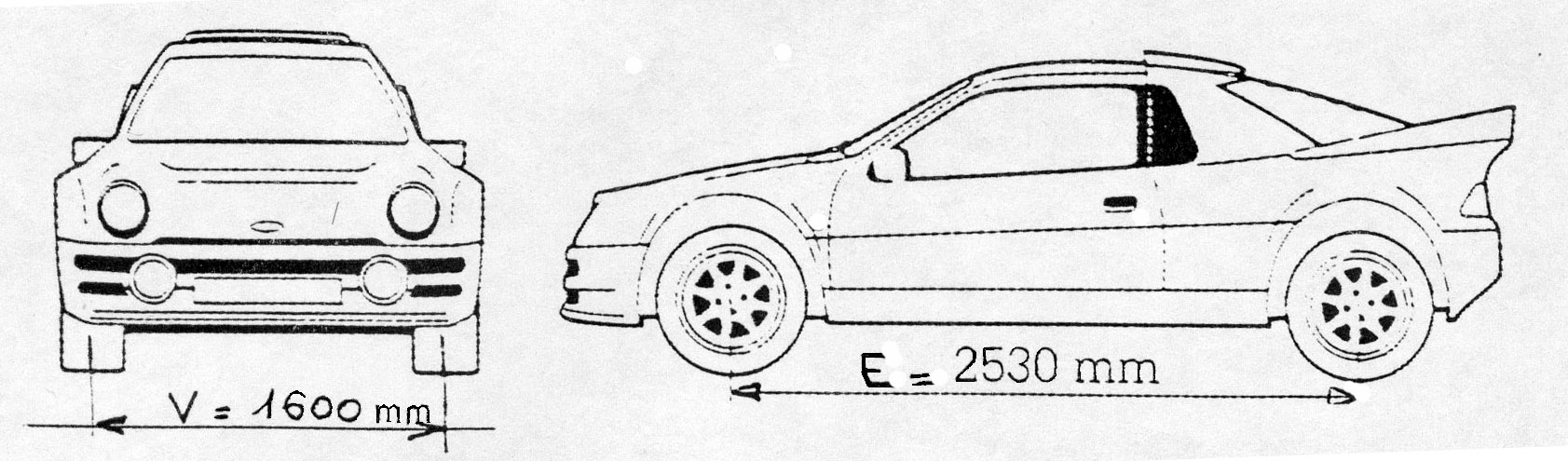
E: empattement
Δ: (Delta majuscule), axe de devers interne
δ: (Delta minuscule) angle de dérive d'une roue
μ: (mu) coefficient d'adhérence avant glissement (μ oX longitudinal) ‑ ( μ oy transversal )
μgx, μgy: coefficient d'adhérence en glissement
RC: centre instantané de rotation de la roue par rapport au châssis
Cs: centre instantané de rotation du châssis par rapport au sol
α: alpha β.bêta Θ. Thêta η. Éta ω. Oméga π. Pi
DÉFINITION DES 3 AXES DE REFERENCE (fig02)
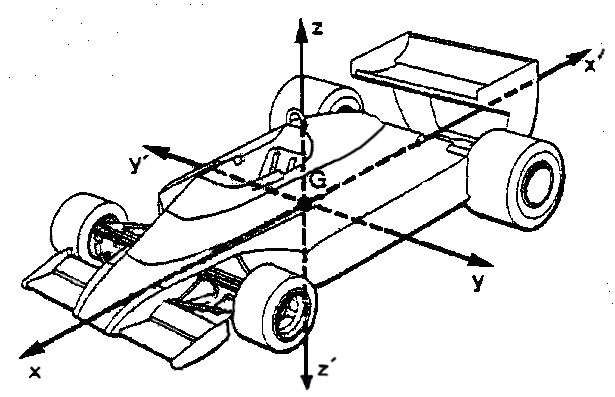
Considérons à notre véhicule trois axes de référence, partant d’un seul point réparti comme suit:
‑ G ‑qui est le centre de gravité du véhicule.
‑ Gx ‑qui est l’axe longitudinal du véhicule.
‑ Gy ‑qui est l’axe transversal du véhicule.
‑ Gz ‑qui est l’axe vertical du véhicule.
DÉFINITION DES DIFFERENTES POSITIONS
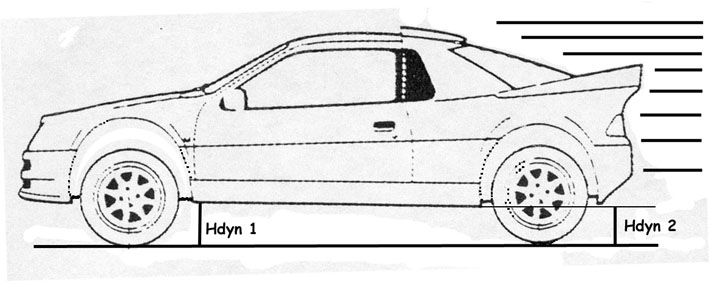
1.3.1. ASSIETTE (fig03)
Position de la structure par rapport au sol, ce terme caractérise un état statique.
1.3.2. ATTITUDE (fig04)
Position instantanée de la structure par rapport au sol consécutive à des sollicitations.
1.3.3. AVANCE (fig05)
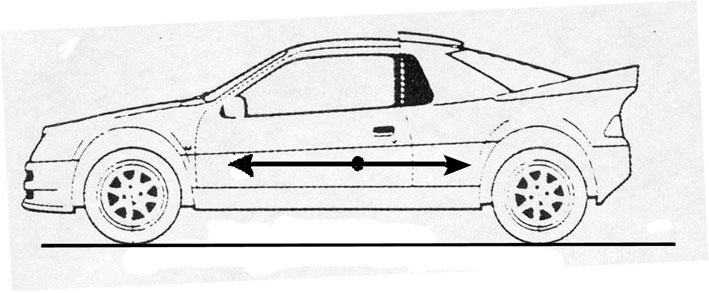
Mouvement longitudinal de la masse suspendue (suivant OX).
1.3.4. BALLANT (fig06)
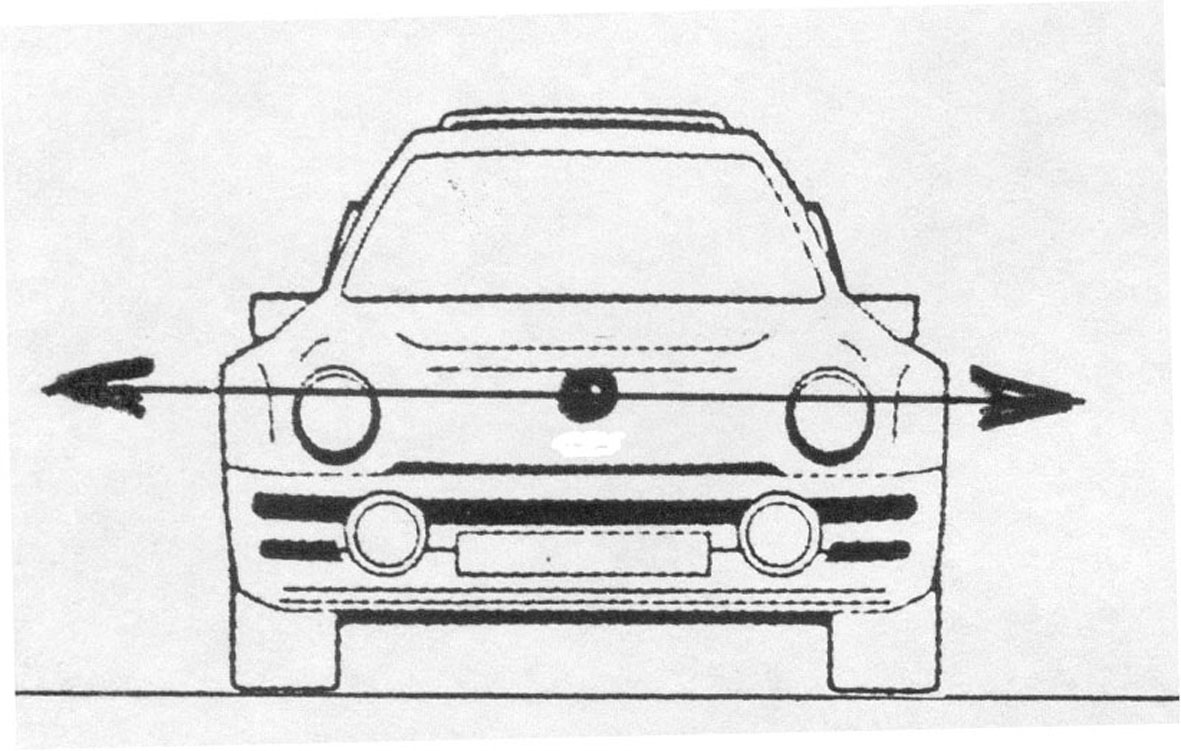
Mouvement transversal de la masse suspendue (suivant OY).
1.3.5. POMPAGE (fig07)
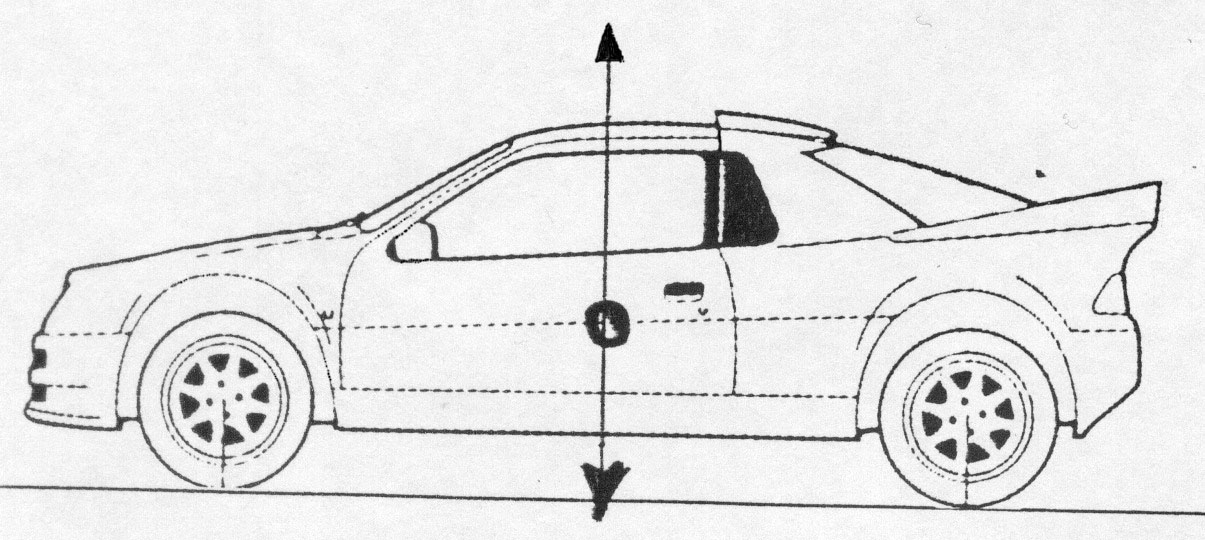
Mouvement vertical de la masse suspendue (Suivant OZ).
1.3.6. LACET (fig08)
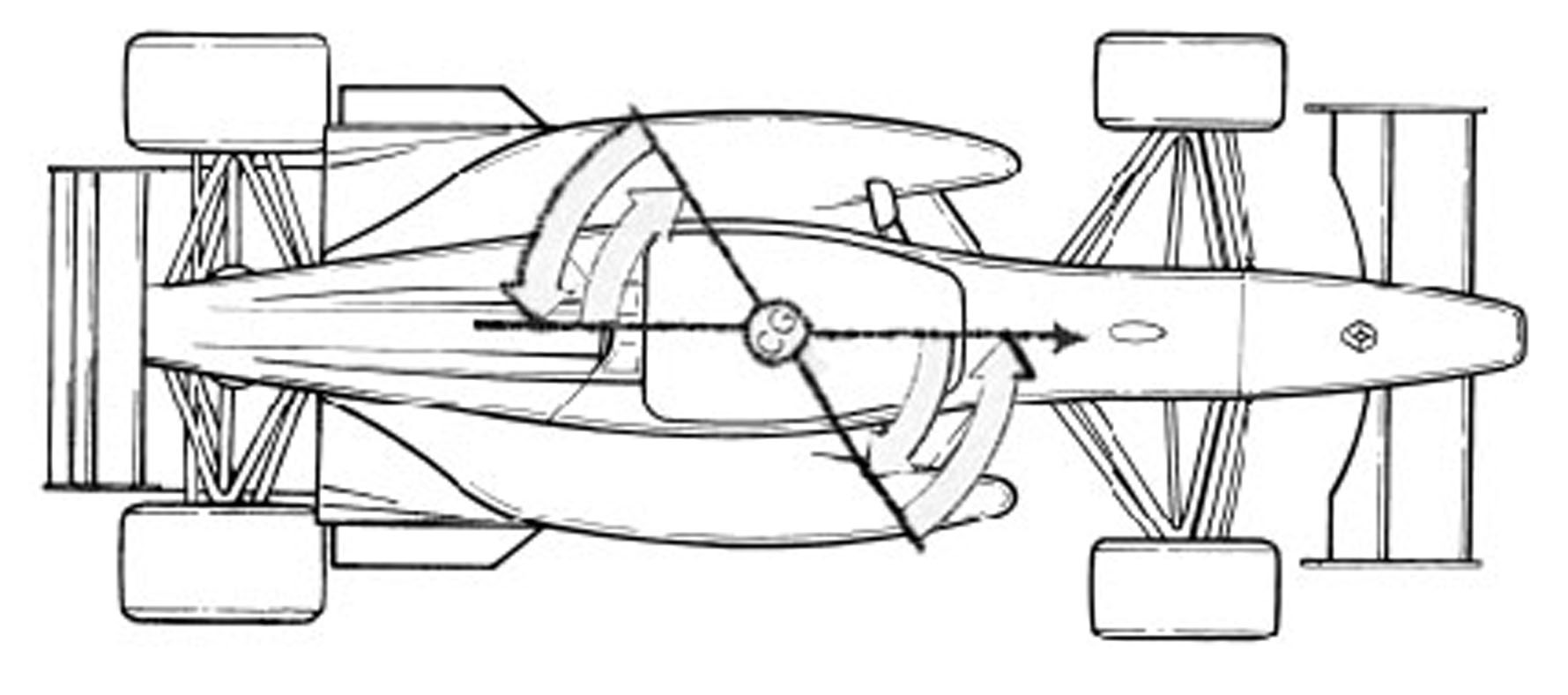
Mouvement de rotation autour de l'axe Oz.
1.3.7. GALOP (fig09)
Mouvement de rotation autour de l'axe transversal Oy (Pompage différentiel).
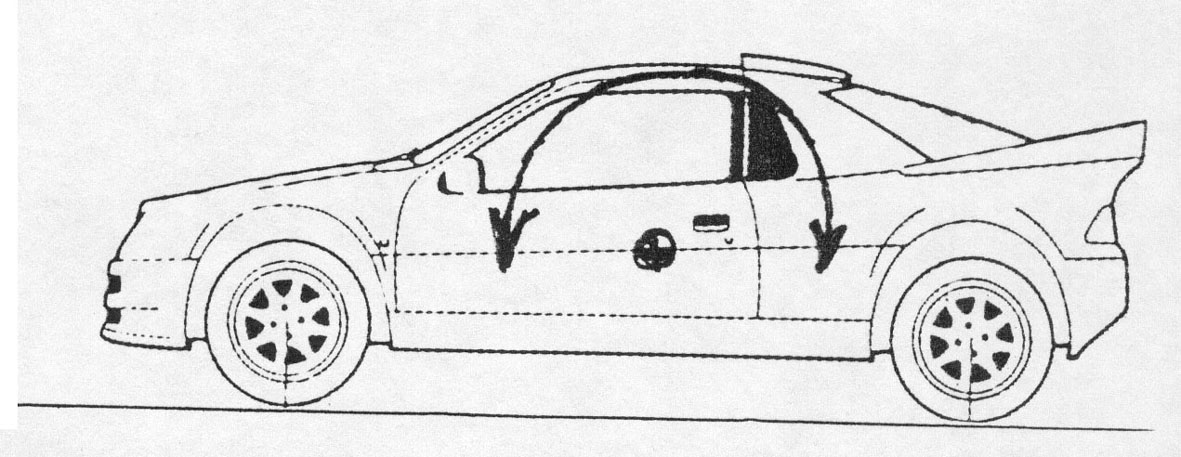
1.3.8. ROULIS (fig10)
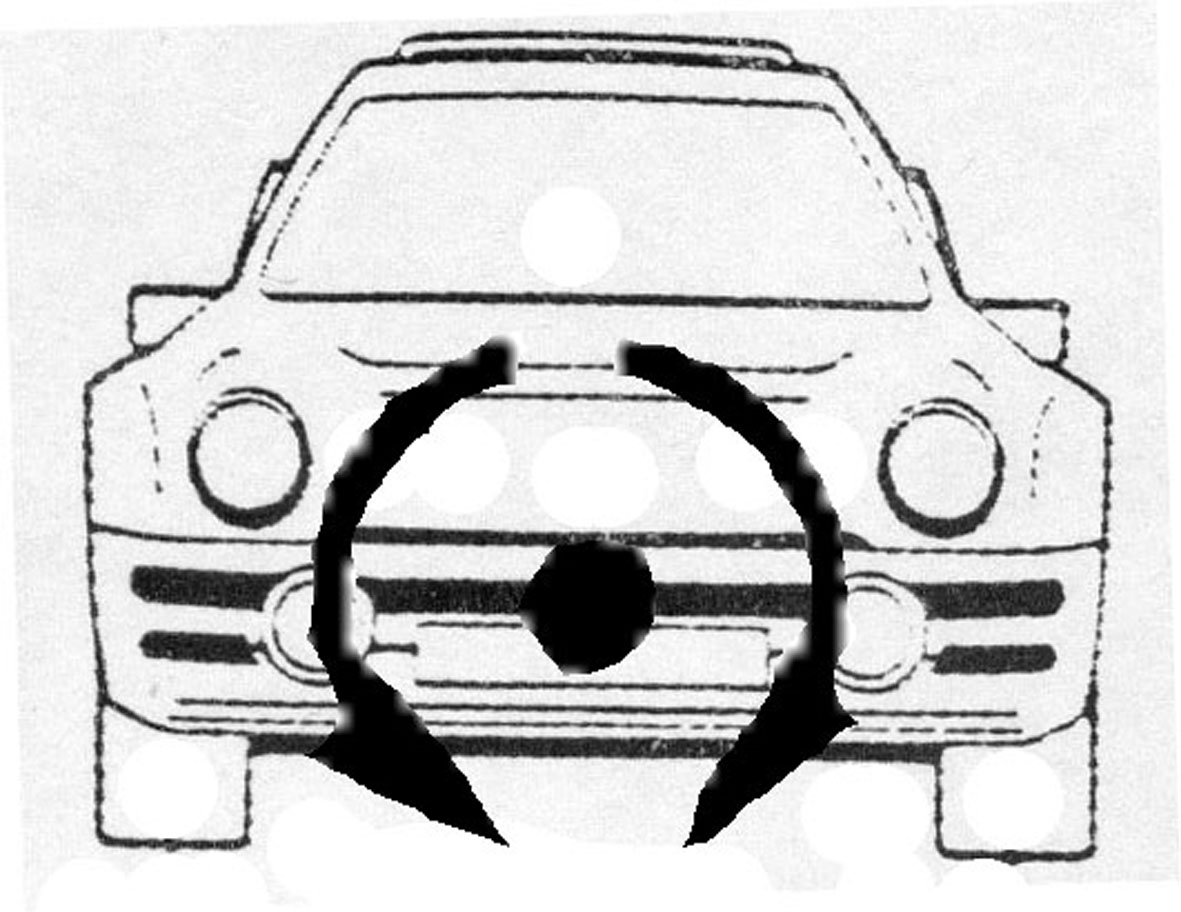
Rotation de la masse suspendue autour de l'axe de devers interne.
1.3.9. CABRAGE (fig11)
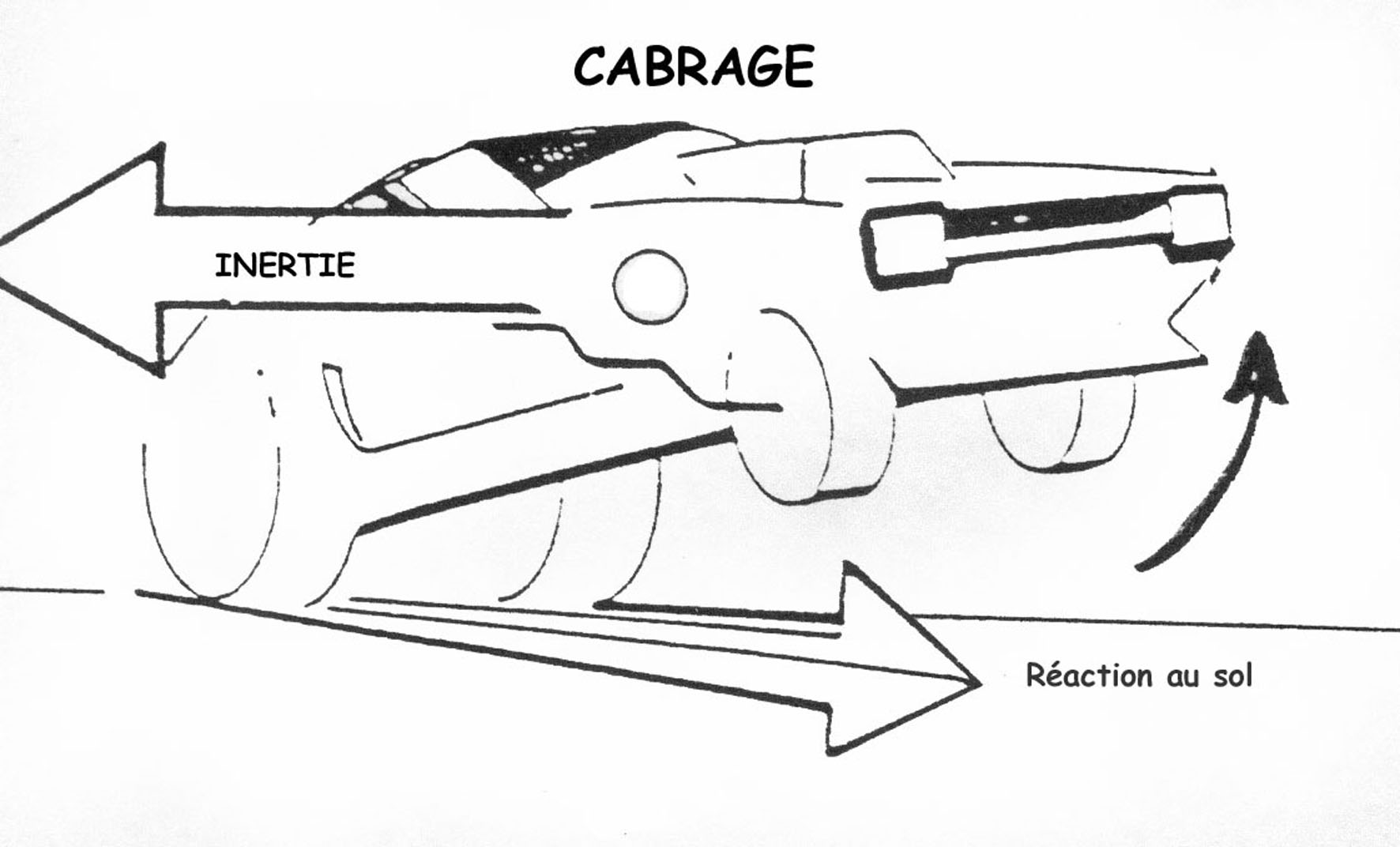
Position de la voiture en accélération.
1.3.10. PLONGEE (fig12)
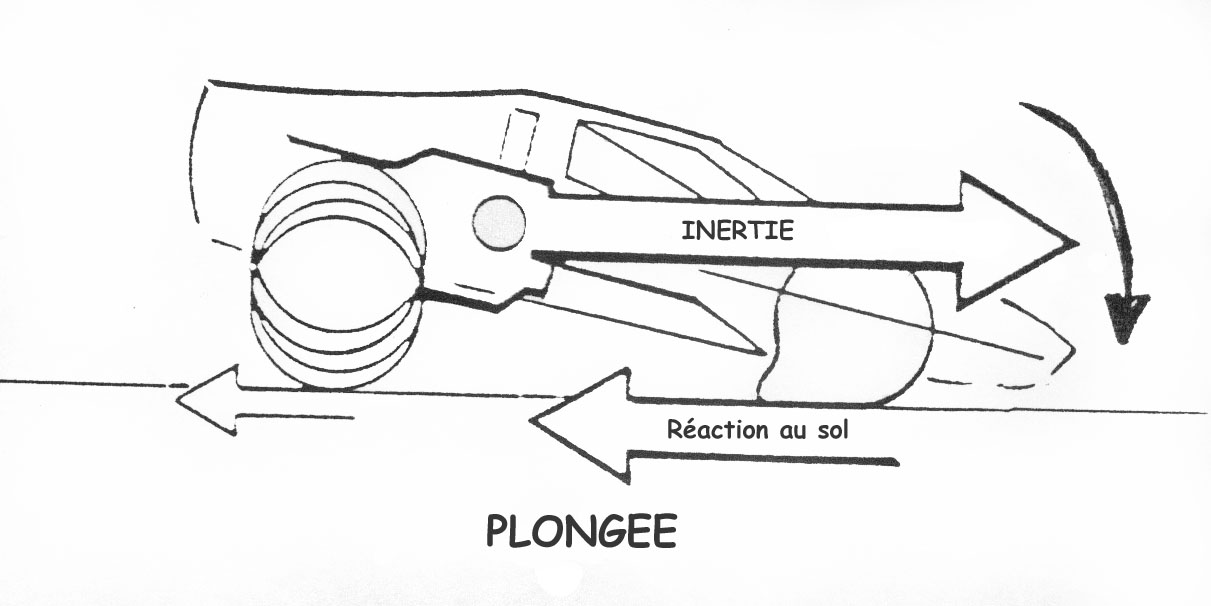
Position de la voiture au freinage.
1.4. AXE de DEVERS INTERNE (fig13)
Axe défini par les Centres de roulis (ou de devers) des essieux avant et
arrière.
DIRECTION
Principe de base de la Timonerie (fig14)
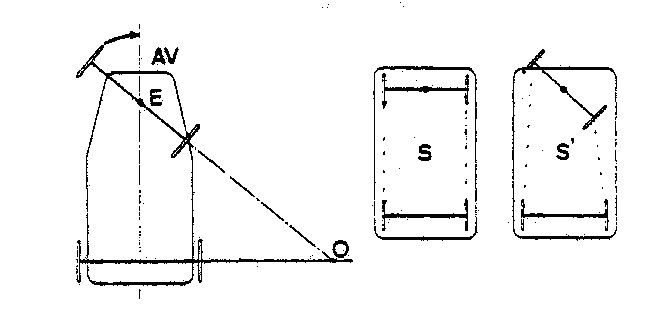
Pour qu’aucune des roues ne ripe en virage, nous savons que les quatre roues
doivent avoir un centre de rotation commun.
Les roues arrière ne pouvant pas braquer, le centre de rotation O devrait se trouver sur l’axe de celles‑ci.
1.5.1. Épure de JEANTAUD (fig15)
L'épure de JEANTAUD résout en grande partie les problèmes de la direction.
Pour qu’un virage s'opère correctement (avec un véhicule ayant une faible vitesse ou étant équipé de roues à bandages), il est nécessaire que les deux roues directrices restent tangentes aux cercles décrits autour du centre de courbure de la route.
Cette condition est remplie pour les roues arrières à l’aide du différentiel.
Pour que cette même condition soit remplie par les roues avant directrices, il faut que les prolongements des axes de fusée viennent se couper en O, sur le prolongement de l'essieu arrière.
Nous constatons qu'une direction
basée sur l'épure de JEANTAUD nous donne un braquage plus f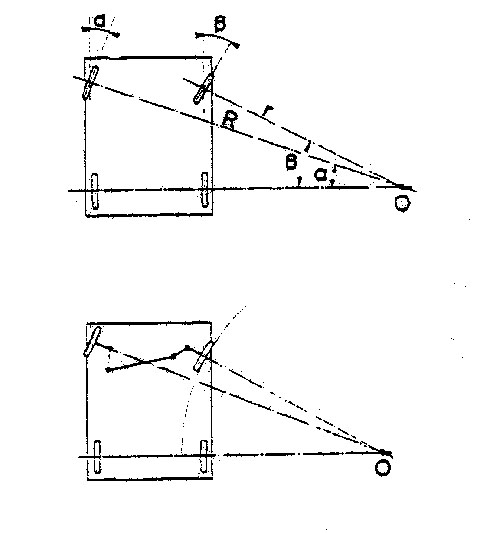 aible de la roue extérieure au virage. Les deux roues directrices suivent donc
parfaitement leur trajectoire théorique..
aible de la roue extérieure au virage. Les deux roues directrices suivent donc
parfaitement leur trajectoire théorique..
La dérive des pne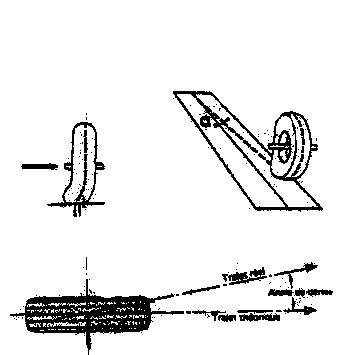 umatiques : du fait de la déformation du pneu sous l'effet d'une force latérale
chaque tour de roue tend à entraîner un peu plus la voiture dans le sens de la
poussée, la trajectoire du véhicule s'en trouve donc sensiblement modifiée.
umatiques : du fait de la déformation du pneu sous l'effet d'une force latérale
chaque tour de roue tend à entraîner un peu plus la voiture dans le sens de la
poussée, la trajectoire du véhicule s'en trouve donc sensiblement modifiée.
Le conducteur, pour conserver la trajectoire, doit constamment braquer les roues.
L'épure de JEANTAUD ne tenant pas compte du phénomène de dérive des pneus en virage, elle est généralement sensiblement modifiée.
Les véhicules actuels étant de plus en plus rapides, de nombreux problèmes qui semblaient résolus ont dû être repensés, c'est le cas de la direction dont la géométrie a dû être adaptée.
A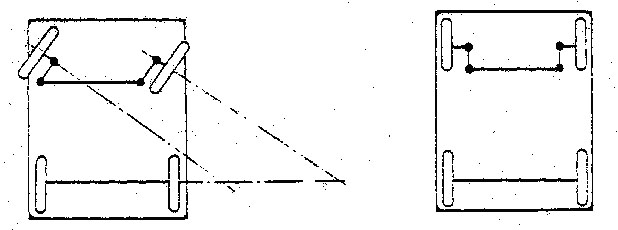 ctuellement, pour 1es voitures de tourisme, la tendance va du JEANTAUD faible
jusqu’aux roues parallèles en virage (fig16) et, pour les voitures de
compétition d’un JEANTAUD moyen à de L'ANTI-JEANTAUD en fonction des
caractéristiques des pneus et surtout de leur réaction sous charge en dérive..
(Fig 17)
ctuellement, pour 1es voitures de tourisme, la tendance va du JEANTAUD faible
jusqu’aux roues parallèles en virage (fig16) et, pour les voitures de
compétition d’un JEANTAUD moyen à de L'ANTI-JEANTAUD en fonction des
caractéristiques des pneus et surtout de leur réaction sous charge en dérive..
(Fig 17)
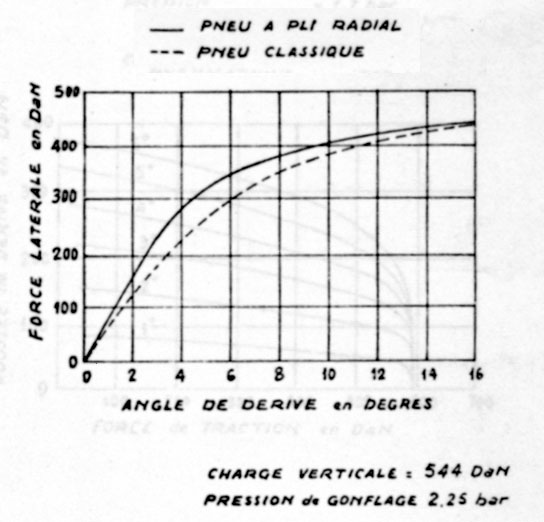
(Fig18)
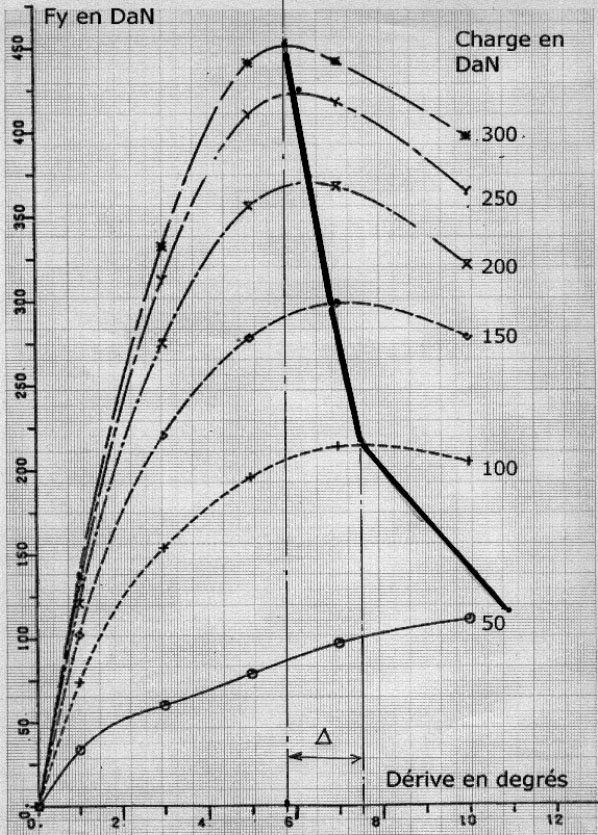 Sur cette courbe de réponse en dérive d’un pneumatique à un effort transversal,
on s’aperçoit que le maximum de Fy se produit avec des dérives plus faibles pour
des charges plus élevées.
Sur cette courbe de réponse en dérive d’un pneumatique à un effort transversal,
on s’aperçoit que le maximum de Fy se produit avec des dérives plus faibles pour
des charges plus élevées.
Donc dans les cas d’un virage si l’on a un transfert de charge de 100kg pour un poids statique de 200kg, la roue en appui aura une charge de 300kg et celle délestée de 100kg.
Pour exploiter le maximum d’effort transversal disponible, il faudra que la roue intérieure soit braquée d’un angle supérieur de Δ° à la roue intérieure (donc nous aurons une direction nécessitant une épure « type Jeantaud »).(Fig19)
S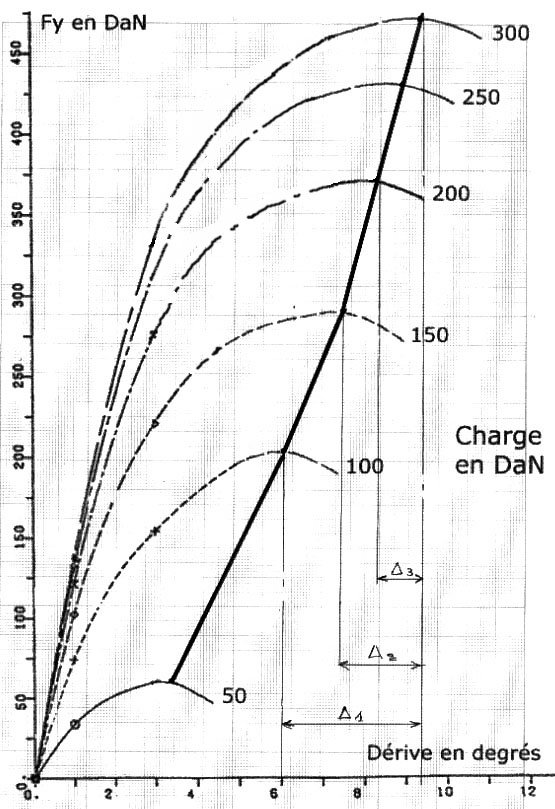 i l’on regarde la deuxième courbe, on voit que c’est l’inverse qui se produit, à
savoir que les maximums se trouvent avec des angles de dérives plus grands pour
des charges plus importantes.
i l’on regarde la deuxième courbe, on voit que c’est l’inverse qui se produit, à
savoir que les maximums se trouvent avec des angles de dérives plus grands pour
des charges plus importantes.
Dans ce cas nous aurons une direction nécessitant une épure « type ANTI-JEANTAUD ».
On remarque aussi que la différence idéale de braquage entre la roue intérieure et la roue extérieure est fonction de la différence de charge entre les deux roues (hauteur du centre de roulis par rapport a celle du centre de gravité), et aussi de la raideur anti roulis ce qui complique un peu le choix d’une géométrie de direction.
Le premier paramètre, et le plus important, est le pneumatique.
Il faut garder à l’esprit que la seule chose qui relie un véhicule à la terre est un morceau de caoutchouc a qui l’on demande beaucoup !
De rester en contact avec le sol quelles que soit les conditions atmosphériques.
D’assurer la direction du déplacement.
D’assurer le mouvement (accélération, freinage).
D’assurer un certain confort.
Partant de là, nous allons examiner le fonctionnement d’un pneumatique et ensuite chercher les réglages qui lui conviendront le mieux.
LES PNEUMATIQUES
Il existe actuellement plusieurs grandes catégories de pneus qui diffèrent par la conception de leur carcasse et dont nous retiendrons surtout celles qui suivent :
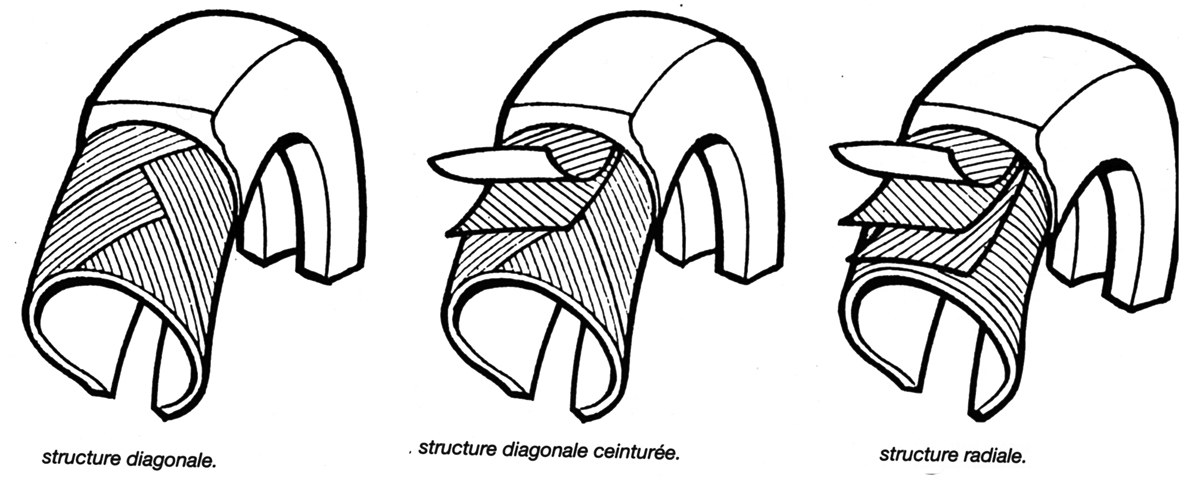 (fig20)
(fig20)
les pneus conventionnels (diagonaux à plis croisés).
les pneus diagonaux à carcasse textile.
les pneus radiaux (arceaux droits et nappes acier).
Caractéristiques Géométriques :
Les plus courantes et les plus connues sont les dimensions géométriques, diamètre extérieur, largeur du boudin ou de la bande de roulement, rapport hauteur/largeur, diamètre de jante, largeur de jante préconisée.
Ex : 16/53x13
16cm de largeur de bande de roulement.
53cm de diamètre extérieur.
13 pouces de diamètre pour la jante.
Autre système :
220/55x13
220 mm de largeur extérieure de boudin
55 de rapport hauteur/largeur en % => H/L = 0,55 d’où H= 0,55x220 = 121mm
13 pouces de diamètre pour la jante.
Le diamètre extérieur du pneu est donc 13x25 ,4 +2H = 572mm
Ces valeurs sont approximatives et seul le catalogue du manufacturier pourra vous donner des chiffres plus précis (voir tableau en annexes).
Entre autre le développement du pneu pour un tour de roue (pour une charge et une pression donnée).
Cette mesure peut être connue toutefois facilement en traçant un trait sur le pneu et le sol et en mesurant la distance parcourue après 10 tours de roue (meilleure précision), la roue étant gonflée à sa pression à chaud.
Il est bien entendu que cette valeur indicative varie en fonction de la charge, de la pression, de la vitesse et du carrossage…. !
Un système de mesure embarqué avec deux cellules espacées d’une distance connue peut vous permettre une grande précision pour différentes vitesses et charges avec un capteur de roue donnant des impulsions connues pour un tour (4/T en FR2000 ; 8/T en F3 et jusqu'à 96/T sur une voiture de série équipée de l’ABS……)
Caractéristiques Dynamiques :
Un pneu ayant pour propriété principale d’être déformable dans toutes les directions, il possédera des particularités
Longitudinales
Verticales
Latérales
Torsionelles
De Dérive
Si il est parfois difficile de connaître les caractéristiques dynamiques d’un pneu en fonctionnement (sauf si vous avez accès aux données constructeurs), le développement permanent des mesures embarquées permet maintenant de faire des recoupements.
-Rigidité Longitudinale :
Elle correspond au déplacement longitudinal du centre de roue par rapport à la surface de contact du pneu au sol, bien que d’une valeur souvent élevée, elle intervient dans les réglages de chasse et complique un peu les réglages d’une traction avant ou d’une quatre roues motrices lors du passage du freinage à l’accélération car l’aire de contact se déplace (par rapport au centre de roue) d’arrière en avant lors de ce changement.
C’est une valeur importante car, en modifiant la chasse propre du pneu, elle modifie le couple d’auto alignement du pneu et donc l’information que celui-ci transmet au pilote à travers le volant.
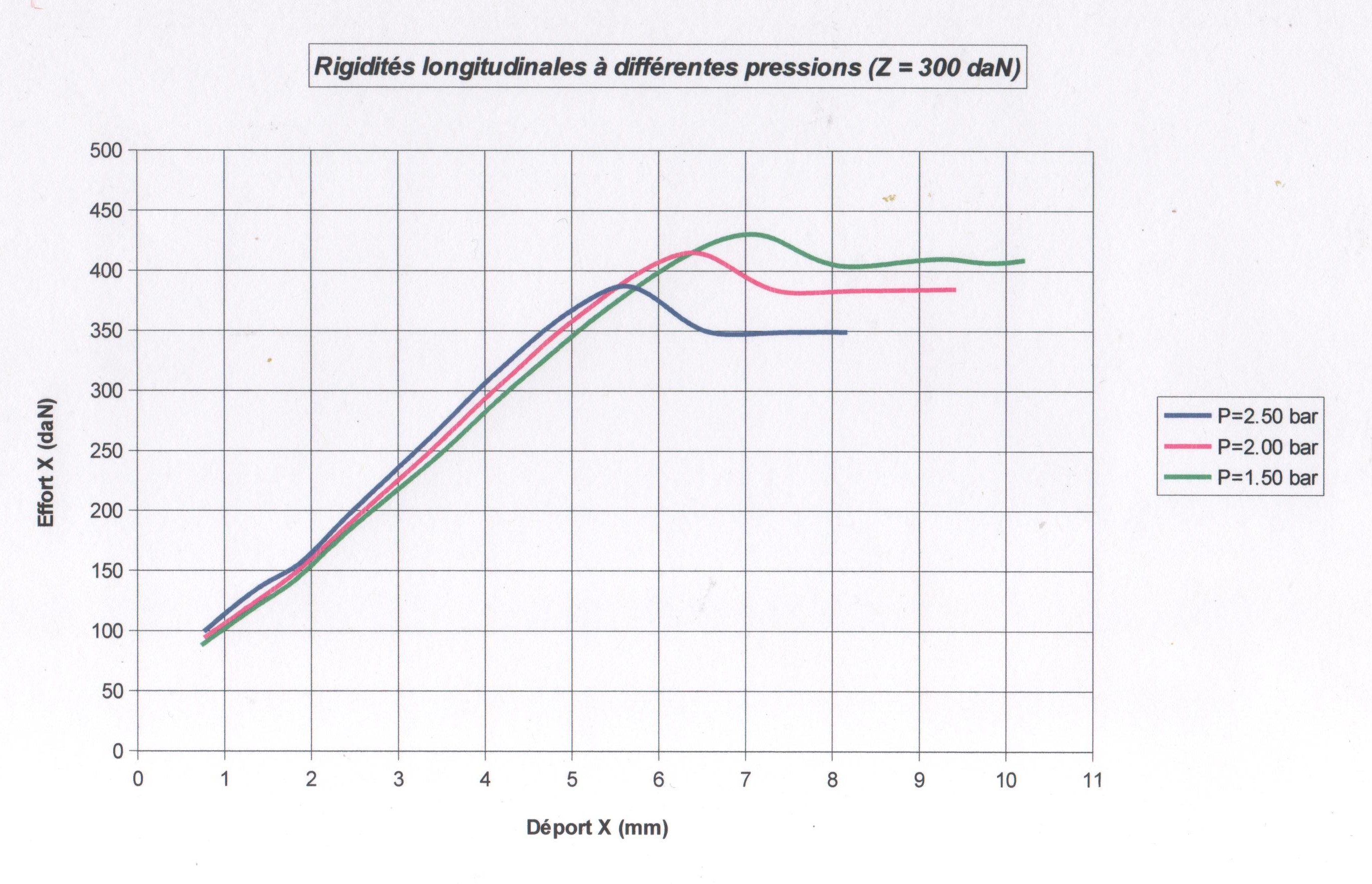
Exemple : (fig 21) Pneu compétition client rallye Michelin.
On voit sur ce tracé que le maximum d’effort longitudinal possible diminue lorsque la pression augmente pour une charge constante et qu’il existe une valeur maximale d’effort au-delà de laquelle on perd brutalement en rigidité avant de se stabiliser sur une perte linéaire.
-Rigidité Verticale (fig 22)
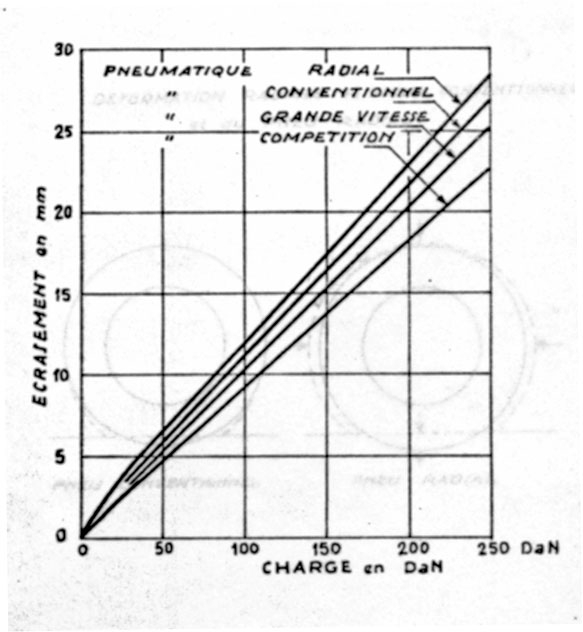
1 ‑ Radial
2 ‑ Conventionnel
3 ‑ Grande vitesse
4 ‑ Compétition
Le pneu radial est plus souple que le conventionnel.
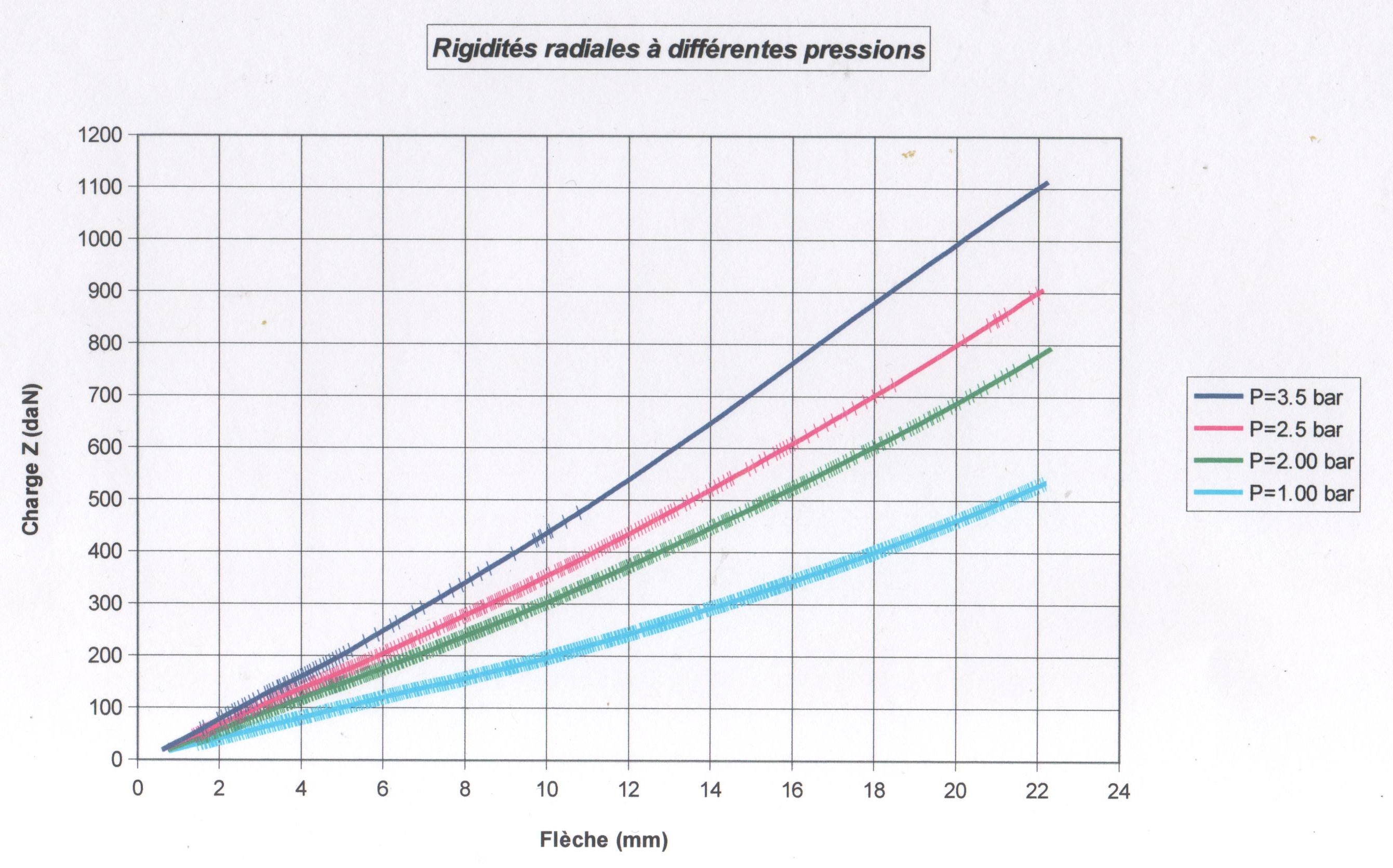
Exemple : (Fig 23) Pneu compétition client rallye Michelin.
On remarque que pour une charge de
400 daN, la rigidité verticale (ou radiale) passe de 22,27 daN/mm pour une
pression de 1bar à 43,30 pour une pression de 3,5 bars.
La rigidité verticale du pneu intervenant dans la raideur verticale globale de la suspension, on comprendra que la modification de la pression interviendra sur plusieurs facteurs (surface de contact du pneu au sol, fonctionnement des ressorts, des amortisseurs, des barres anti roulis, comportement en courbe).
Elle se mesure par la variation de hauteur du centre de roue pour différentes charges mais pour une pression et un carrossage donnés, sans dérive.
Cette caractéristique du pneu est l’une des principales en terme de confort et aussi de comportement sur sol bosselé, car il permet à la surface de contact de bien épouser le profil du sol qu’elle rencontre.
Toutefois, celle que l’on peut mesurer facilement est la statique (avec une balance, un comparateur et des charges), et celle qui intervient directement dans le fonctionnement de la suspension est la dynamique qui nécessite plus de matériel.
La détermination de la rigidité
dynamique se fait par la recherche de la fréquence de résonance d’un système
mécanique ayant une inertie connue et dont la partie élastique est le
pneumatique.
Ces mesures, souvent faites en laboratoires, peuvent maintenant être faites sur
voitures grâce au progrès des capteurs (accélération, vitesse de roue,
déplacements…) et des systèmes embarqués actuels.
La relation caractéristique des systèmes élastiques à un degré de liberté : K= mω2 fournit la rigidité du pneu K, une fois connue la fréquence de résonance du système (ω : la pulsation = 2πf , f : la fréquence en Hz ou cycles/sec et m : la masse équivalente du pneu.)
Si l’on regarde l’évolution de la rigidité dynamique en fonction de la vitesse, de la charge, de la pression et de l’amplitude, celle-ci diminue rapidement entre 0 et 20 Km/h puis reste proche d’une constante au-delà ; elle est très sensible à la pression, complexe avec la charge qui entraîne des variations de forme de la carcasse et presque insensible à l’amplitude.
Nous retiendrons surtout sa sensibilité à la pression car c’est l’un des paramètres que l’on peut faire varier facilement, sans oublier l’importance de la charge qui peut avoir de l’influence dans le cas de voitures chargées aérodynamiquement.
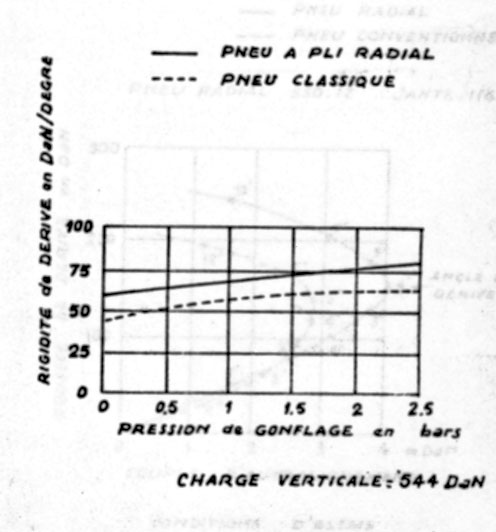
Rigidité Transversale. (Fig. 24)
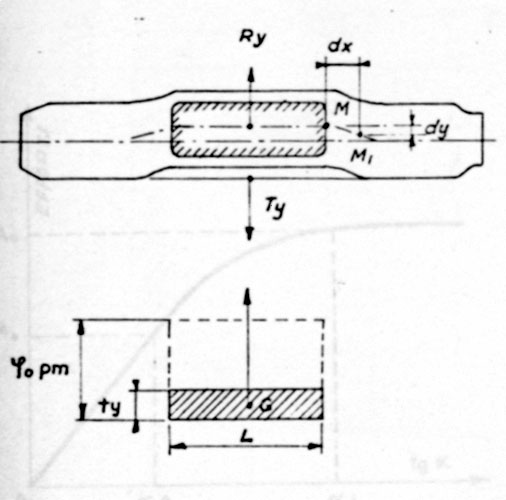
C’est la possibilité de déplacement du plan de la roue par rapport à l’aire de contact au sol dans le sens transversal sous l’action d’une force.
On appellera rigidité transversale, le rapport entre l’effort transversal et le déplacement latéral
dy: Dt = Ty/dy en remarquant que sous effort transversal sans braquage on retrouve une dérive dy/dx lorsque la roue tourne.
Comme pour la rigidité verticale, la rigidité latérale dépend beaucoup de la conception et des autres paramètres (vitesse, charge, pression, largeur de jante…).
.Elle est plus faible sur un radial que sur un conventionnel car les flancs du pneu radial sont plus souples.
La rigidité latérale croit avec la pression et décroît avec la charge.
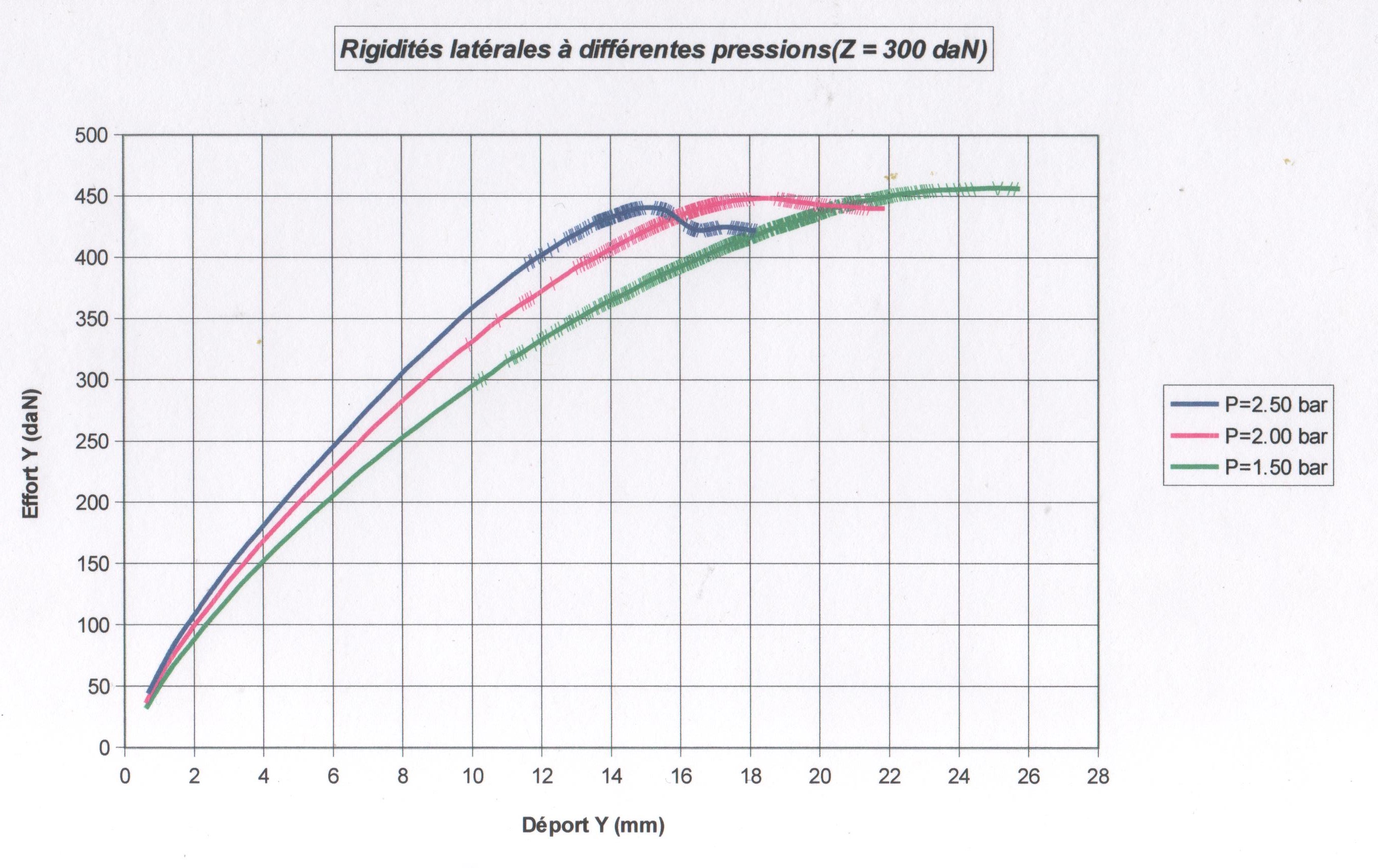
Exemple : (fig25) Pneu compétition client rallye Michelin.
On remarquera que:
La rigidité latérale intervient sur :
Le temps de réponse du pneumatique ce qui peut amener des imprécisions de conduite, lors d’un vent traversier sur une route bordée d’arbres. On peut même rencontrer des mouvements de lacet dus à la différence de rigidité transversale des pneus AV et AR, à la force du vent et à l’écartement entre les arbres… !
L’adhérence en cas de braquage violents et/ou rapides. Le pneu se comporte comme un amortisseur a relaxation et permet à la réaction de guidage de garder une valeur stable.
Toutefois si l’on examine certains pneus à profil très bas montés sur des jantes larges, il est certain que la rigidité latérale élevée permet une grande précision de conduite mais ne supporte pas une grande variation dans le profil de route en appui ou des mouvements brusques de volant lors de l’approche de la limite d’adhérence.
5)Rigidité Torsionelle:
C’est la torsion du pneu autour du centre de roue par rapport à l’aire de contact au sol, elle est une combinaison des autres rigidités et entraîne des déplacements longitudinaux et verticaux du centre de roue.
Essentiellement fonction de la construction du pneu, elle est influencée par tous les paramètres intervenant dans les autres rigidités, un radial étant dans ce domaine plus souple qu’un plis croisé, de même qu’un « taille haute » sera plus souple qu’un « taille basse ».
La mode actuelle des profils ultra bas permettant, pour un diamètre extérieur donné, d’avoir des jantes et donc des freins plus grands, pourrait bien trouver ses limites aussi bien au freinage qu’en accélération sur les terrains un peu bosselés (comme nos routes ou certaines pistes) car ce type de profil rend l’approche de la limite d’adhérence plus délicate à percevoir et le déclenchement des pertes et des récupérations d’adhérence plus brutal.
Par exemple, le cas des courses de RUN sur 200m-Départ arrêté nécessite des pneus ayant une grande souplesse torsionelle pour amortir la mise sous couple brutale au démarrage et favoriser une adhérence maximale sur les premiers mètres.
6)Rigidité de dérive:
Tout d’abord la dérive est l’angle formé par la différence entre la trace du plan de roue et la trajectoire du centre des efforts dans l’aire de contact du pneu.
C’est la plus importante de toutes car c’est réellement elle qui commande le comportement de la voiture.
Exemple : (fig26) Pneu compétition client rallye Michelin
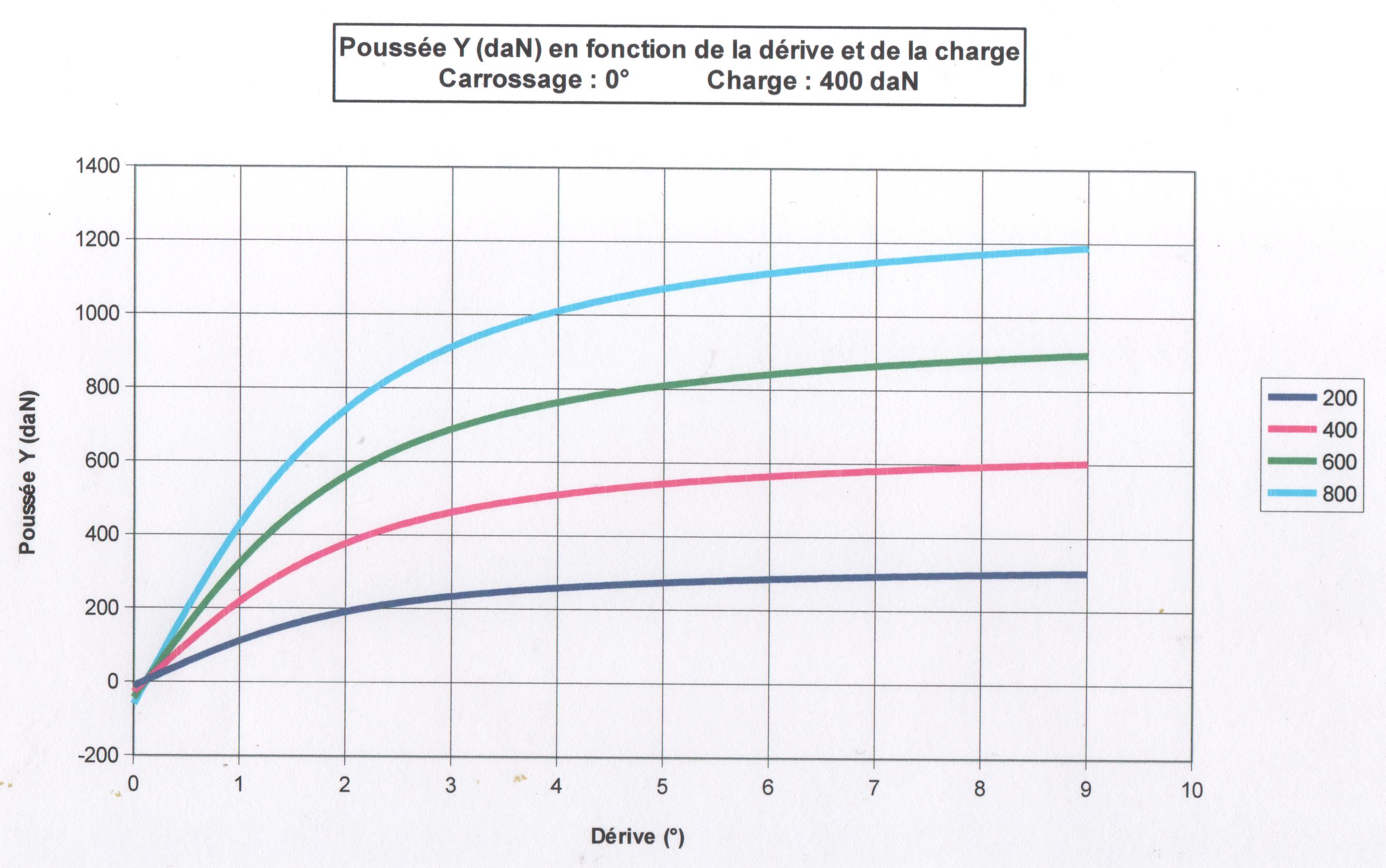
On appellera rigidité de dérive, le rapport entre l’effort transversal et l’angle de dérive :
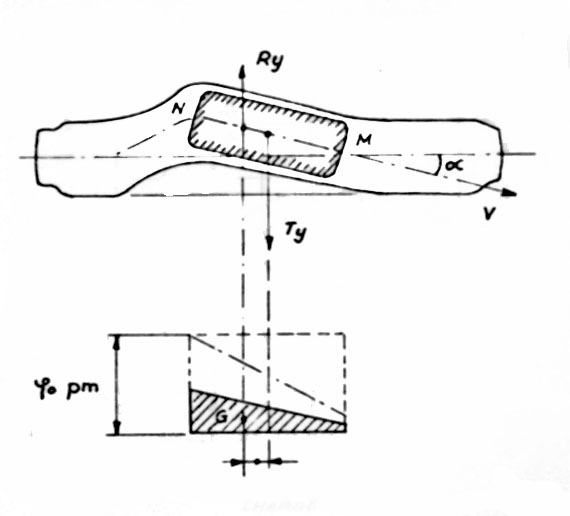
fig27
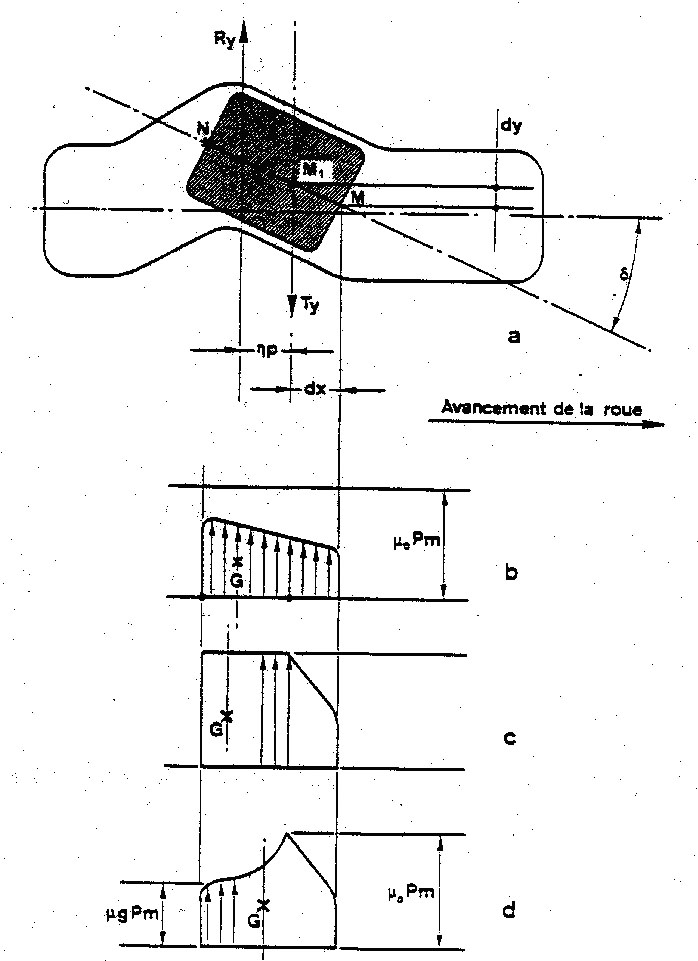
Ry = résultante des forces dans l'aire de contact
Ty = effort à la jante (donc effet sur la roue)
G = point d'application de RY barycentre des forces dans l'aire de contact
M = particule au repos et entrant dans l'aire de contact
M1 = particule ayant parcourue une longueur dx
μ0= coefficient d'adhérence du pneu sur le sol (est fonction du sol et de la qualité de la gomme du pneu)
pm = pression moyenne dans l'aire de contact (est fonction de la charge portée par la roue, de la pression du pneu et de la surface de l'aire de contact.)
ηp = chasse du pneu.
Figure a
Lors de l'avancement de la roue, la particule qui se trouve au point M se retrouve au point M1 et ensuite en N.
Pour un avancement de la roue d'une longueur dx, on constate un déplacement d'une largeur dy. En conséquence, l'aire de contact se déplace suivant un angle δ appelé angle de dérive.
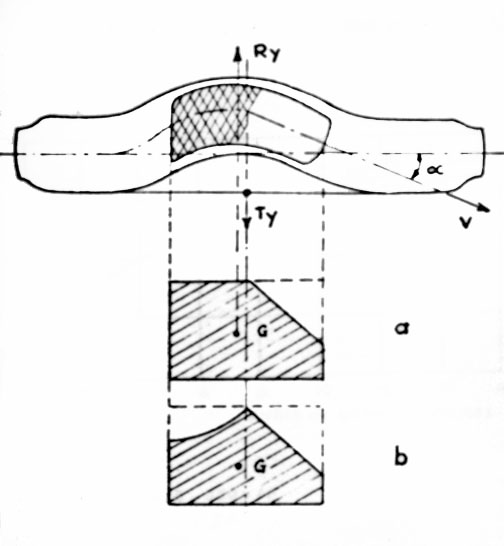
Figure b
La force unitaire que peut donner chaque particule est égale à μo Pm..
Sur la figure, on remarque que les forces unitaires sont très inférieures à μoPm.
Figure c
Sur cette figure, on remarque que chaque force unitaire reste inférieure ou égale à μo pm. On se retrouve en régime adhérent ou en régime de pseudo glissement.
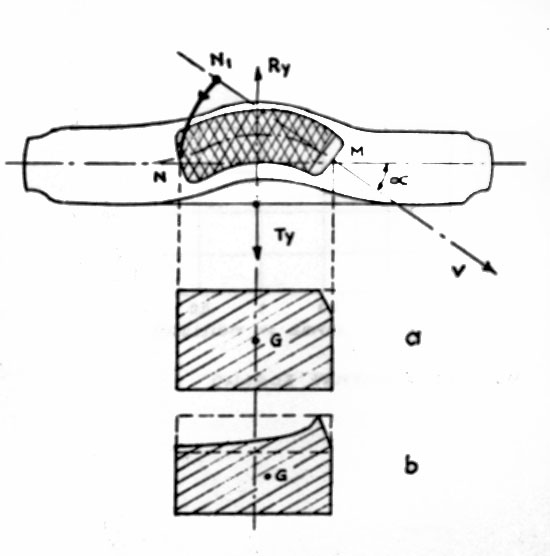
Figure d
Sur cette figure on remarque que si l'on impose au pneu un effort plus grand, on voit apparaître des glissements dans l'arrière de l'aire de contact ; la résultante Ry placée sur l'aire de contact en G revient sur l'axe de roue et peut même passer en avant de cet axe. Ceci explique que l'on soit obligé de mettre une chasse mécanique positive pour que dans le cas où la résultante Ry arriverait à l'extrême avant de la surface de l'aire de contact, il y ait toujours un rappel positif des roues en position de ligne droite.
On constate en général une bonne différence entre les radiaux et les plis croisés, le radial donnant son maximum d’efficacité pour un angle de dérive plus faible que le pli croisé.
Ceci amène les réflexions suivantes :
Une même voiture, sur un parcours identique, avec des pneus de capacité équivalente ira plus vite avec les pneus qui dérivent le moins car elle aura des trajectoires plus tendues (plus grand rayon de courbure pour un virage donné).
Sur un parcours imposé, c’est la voiture qui « balaye » la plus petite surface au sol qui ira le plus vite. Sans faire intervenir les pneus particulièrement car ils peuvent être de dimensions, construction, gommes... différents.
Nous pouvons quand même dire que c’est celui qui dérive le moins qui est le mieux placé pour cela.
Commentaires de Pierre Dupasquier (Michelin):
« Il est généralement admis que développer la poussée de dérive maxi sous un angle faible est plus avantageux que si l’angle de dérive doit être important. Mais encore faut il que cette poussée maxi soit identique et que le pilote réussisse à contrôler le véhicule dans ces conditions. »
En fait, plus la poussée maxi est à faible angle de dérive, moins le pneu s’use vite par abrasion : c’est d’une logique implacable ! Moins d’échauffement amène une plus grande constance du pneu. Cela permet d’utiliser des gommes plus tendres, plus adhérentes, mais résistant moins bien à l’abrasion. Ce type de solution a par contre un inconvénient : il est beaucoup plus exigeant pour le pilote car celui-ci devra maintenir le point de fonctionnement de ses pneus (avant et arrière) dans une plage de dérive beaucoup plus étroite. D’autant que ces pneus sont souvent moins progressifs, donc réservés aux pilotes ayant les temps de réaction les plus brefs !
« La performance appelle la performance !" (Michelin Compétition – O.M.)
FACTEURS INFLUENTS SUR LA RIGIDITÉ DE DÉRIVE
1°) Structure du pneu fig 28 & 29
a ‑ Conventionnel:
La rigidité de dérive croit lorsque l'angle des nappes de la carcasse diminue. Étant donné que l'angle des nappes de la carcasse conditionne aussi la rigidité verticale, un pneu conventionnel qui aurait une grande rigidité de dérive n'aurait plus de flexibilité verticale. Ce type de pneu donne sa réponse optimale autour de 12° de dérive.
b ‑ Radial:
La rigidité de dérive croit avec la largeur de la bande de roulement et avec le module d'élasticité de ses matériaux.
Ce type de pneu peut avoir une très grande rigidité de dérive tout en conservant une grande souplesse; il donne sa réponse optimale autour de 5° de dérive ce qui entraîne un comportement différent de celui du conventionnel.
Une voiture équipée de pneus radiaux devra posséder des ancrages beaucoup plus précis qu'une voiture équipée de pneus conventionnels (beaucoup de Citroën, à l’époque où cette marque appartenait à Michelin avaient leurs triangles de suspension montés sur roulements à billes ou à aiguilles … DS, 2CV, 3CV, SM, GS, CX …).
2°) Largeur de jante (fig 30)
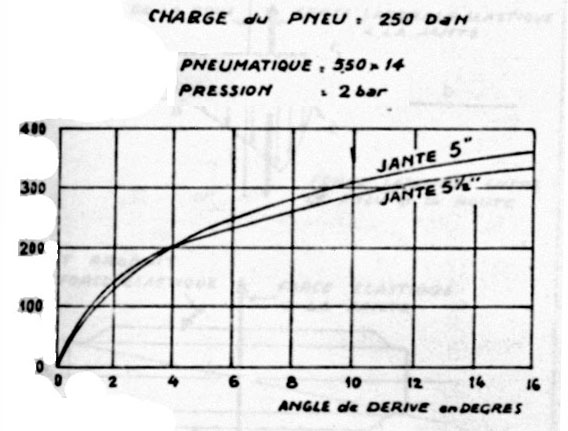
Une plus grande largeur de jante donnera une plus grande stabilité en ligne droite, mais le phénomène s'inversera en courbe ou dans les grands angles de dérive.
La rigidité de dérive augmente avec la pression dans les mêmes proportions pour le pneu radial et le conventionnel. Toutefois, pour des fortes pressions, la réduction de l'aire de contact fait apparaître plus vite des glissements partiels.
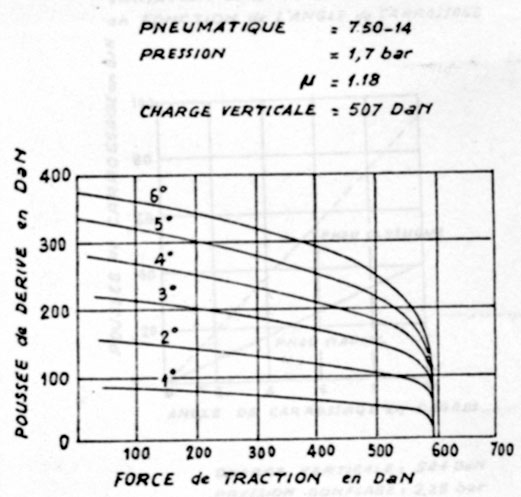
4°) Charge portée (fig 32)
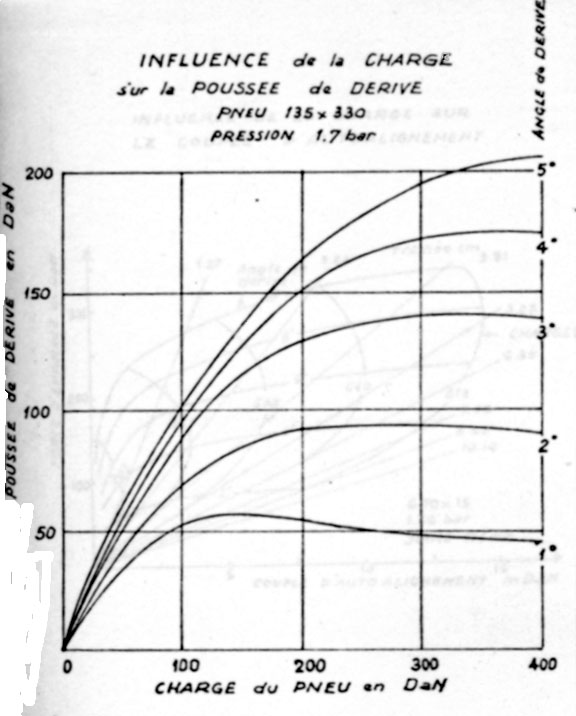
Pneu 135 x 330 pression 1,7 bar
Par ce faisceau de courbes iso dérives, c'est‑à‑dire effectuées à dérives constantes, nous constatons que pour une pression déterminée, nous avons, un effort transversal maximum (Ty) qui correspond à une charge déterminée.
Nous constatons que pour un pneu donné, il existe une charge maxi portable par la roue qui sera fonction
‑a : du poids statique porté par la roue,
‑b : du transfert de poids (ressort et barre antiroulis),
‑c : de la charge aérodynamique (fonction de la vitesse).
En fonction de la conception de la voiture et de son utilisation, on a intérêt à choisir une dimension de pneu telle que l’addition de toutes les charges nous permette de rester à l'intérieur du maximum que peut nous donner le pneu.
5°) Sollicitations (fig 33)
L’application d'un effort moteur ou d'un effort de freinage affecte la rigidité
de dérive. L’adhérence globale  que l'on représente par un cercle ou une
ellipse est la somme géométrique (résultante) de deux composantes:
- une longitudinale
‑ une transversale
C’est‑à‑dire que a chaque fois que l'on aura besoin de transmettre un effort longitudinal, on diminuera d'autant la possibilité de transmettre un effort transversal.
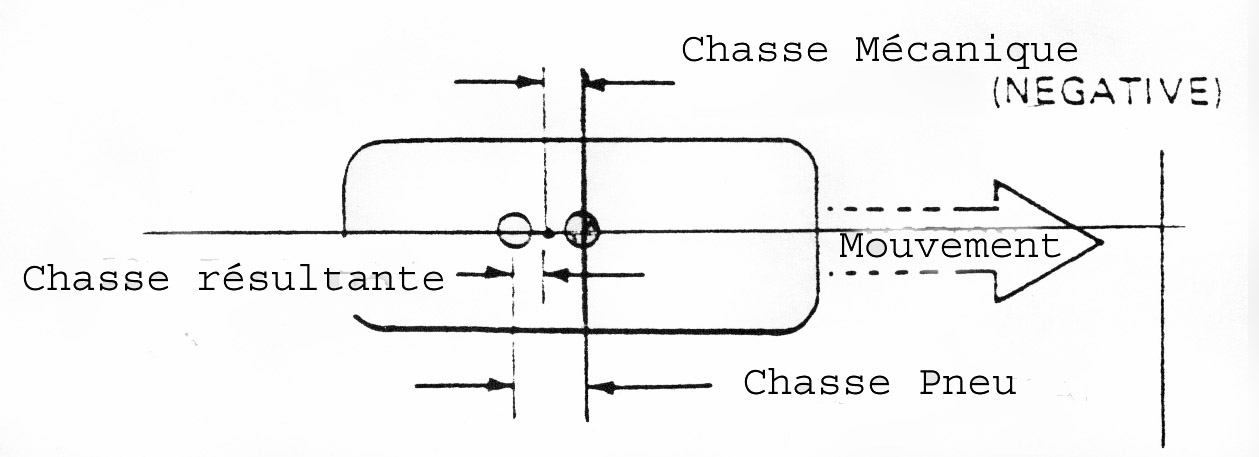
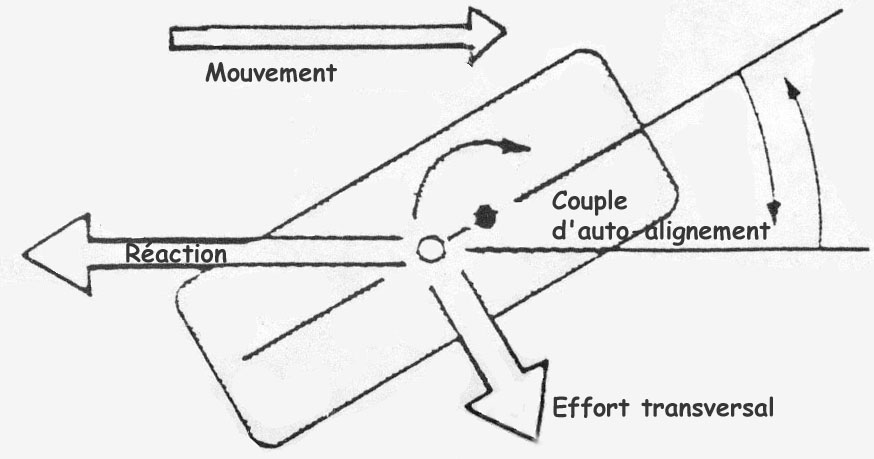
COUPLE D'AUTO‑ALIGNEMENT (fig 34)
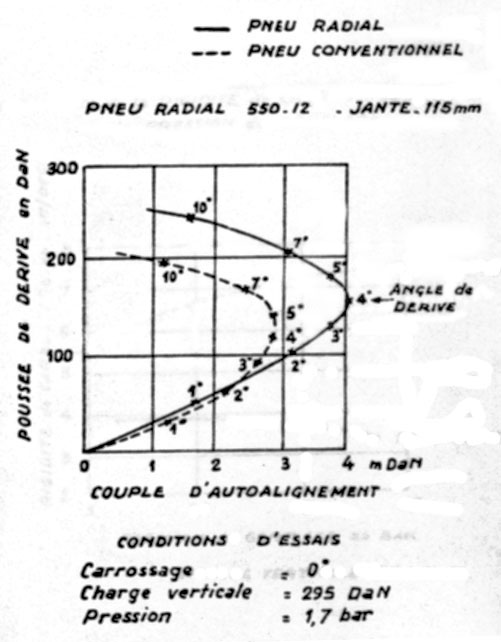
Nous avons vu au chapitre de la dérive qu'il y avait une différence de position
entre la résultante des forces sur le sol (RY) et la force élastique à la jante
(TY) que l'on avait appelé la chasse du pneumatique.
Nous avons constaté qu'en fonction de l'angle de dérive et de l'effort transversal demandé, la résultante RY se déplaçait d'abord en s'éloignant de l'axe de roue puis revenait sur l'axe de roue au fur et à mesure que l'on augmentait la dérive générale du pneumatique.
Le fait du déplacement de RY entraîne un couple, dit COUPLE D'AUTO‑ALIGNEMENT.
Pour conserver une information au volant, on sera amené à mettre une chasse mécanique sur la voiture qui fera basculer la courbe d’auto alignement sur l'avant de façon à avoir une chasse positive même au maximum de dérive possible du pneumatique.
POUSSÉE DE CARROSSAGE (fig 34,35)
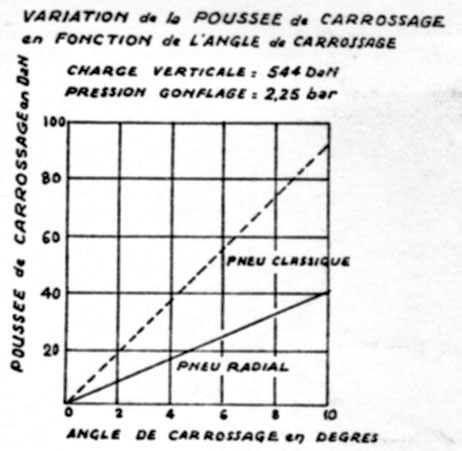
Une inclinaison de la roue introduit une dissymétrie des sollicitations dans l'aire de contact. Le carrossage est donc, en l'absence de dérive, générateur d'une poussée transversale vers l'extérieur si le carrossage est positif et vers l’intérieur si il est négatif.
Un pneu radial accepte beaucoup plus de variations de carrossage qu'un pneu conventionnel car pour un même angle, il donne moins de poussée.
Par contre, il ne faut pas oublier
que certains radiaux comme les Michelin supportent mal le carrossage positif !
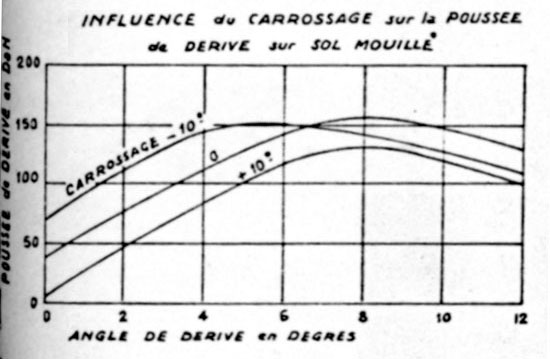
Exemple : (fig 36) Pneu compétition client rallye Michelin :
Sur cet exemple, on voit que le carrossage positif (+1, +2, +3) entraîne une diminution de la poussée de dérive et c’est la raison pour laquelle on mettra du négatif en statique.
Poussée de dérive en fonction du carrossage (Z = 400 DaN)
LES ANGLES DU TRAIN AVANT
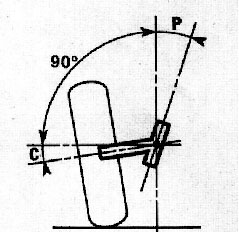
LA CHASSE (fig 37)
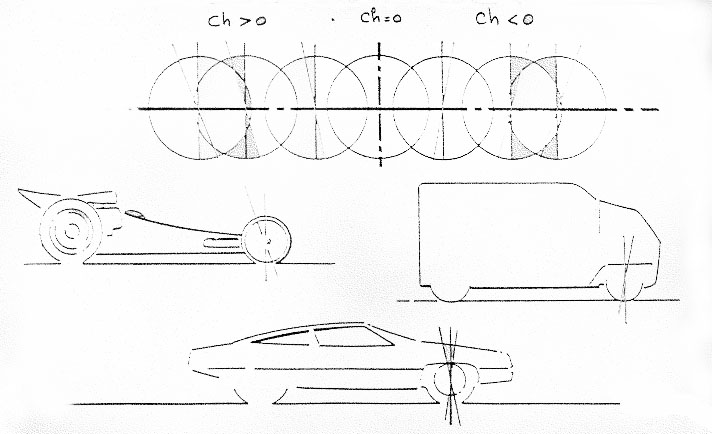
Définition:
‑ Angle : c’est l’angle d’inclinaison du pivot de roue par rapport à la verticale, le véhicule étant vu de profil. (Fig 38)

Distance : c’est la distance séparant la projection de l’axe de pivot sur le sol, avec la projection verticale de l’axe de la fusée (point de contact théorique de la roue sur le sol).
C’est aussi la distance entre le centre des efforts dans l’aire de contact du pneumatique et le point de projection de l’axe de pivot.
Pourquoi la chasse ?
Il y a trois raisons pour mettre de la chasse:
1°) Pour assurer la stabilité en ligne droite,fig39
2°) Pour assurer un meilleur rappel au volant après un virage et donner une information au conducteur sur l’adhérence des pneumatiques. Fig 40
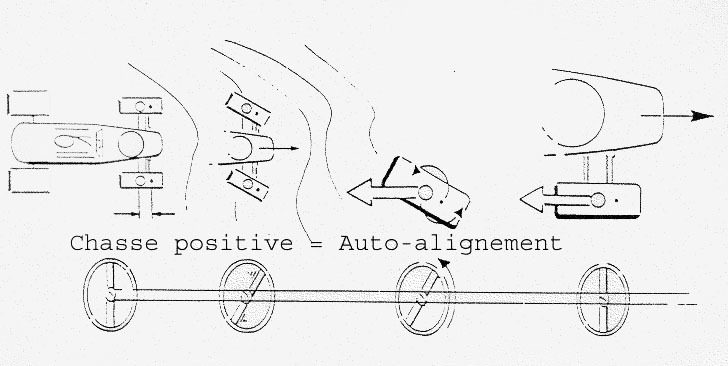
3°) Conjugué avec l’angle de carrossage, l’angle de chasse peut parfaire la position de la roue en braquage.
(L’exemple de la 2CV Citroën est frappant : Carrossage statique = 0° ; Pivot = 0° ; Chasse = 10° => carrossage négatif en braquage sur la roue en appui !).(fig41)
On constate sur la figure que sans moment (effort x bras de levier), il n’y a pas d'orientation de la roue. Dans le 2ème cas, la condition est remplie, le moment est créé dans le sens de l'effort moteur.
Comment régler la chasse ?
1°) Quadrilatères déformables (triangles de suspension):
La voiture étant de profil, pour mettre de la chasse, par rapport à l'avant du véhicule, on recule le point d'application supérieur de l'axe de pivot ou on avance le point d'application inférieur de l'axe de pivot.
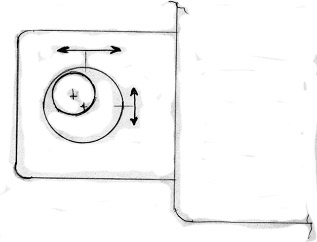
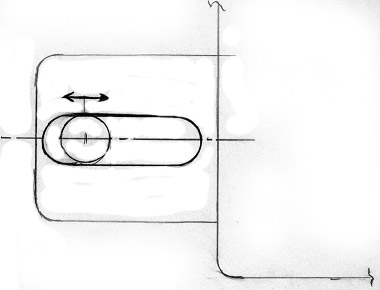
2°) Système MAC PHERSON:
On modifie la chasse en réglant la longueur du tirant ou en déplaçant le point d’articulation supérieur sur le châssis.
Pourquoi modifier la chasse ?
Plus la dérive du pneu est importante, plus la résultante Ry placée sur l'aire de contact en G revient sur l’axe de roue et peut même passer en avant de cet axe.
(Fig 27a, b, c, d)
Ceci explique que l'on soit obligé de mettre une chasse mécanique positive pour que dans le cas ou la résultante Ry arriverait à l'extrême avant de la surface de l’aire de contact, il y ait toujours un rappel positif des roues en position de ligne droite.
En conclusion, en fonction de la conception et des caractéristiques des pneumatiques, qu'ils soient de type conventionnel ou radial, d'utilisation de tourisme ou de compétition, on modifiera l'angle ou la distance de chasse.
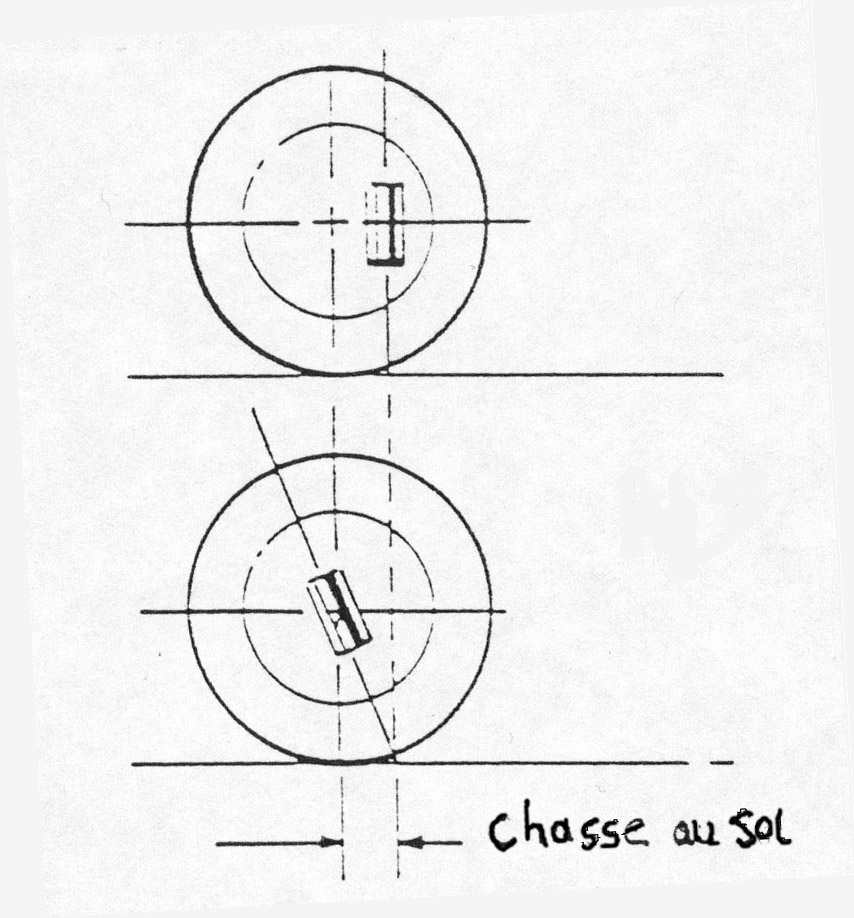
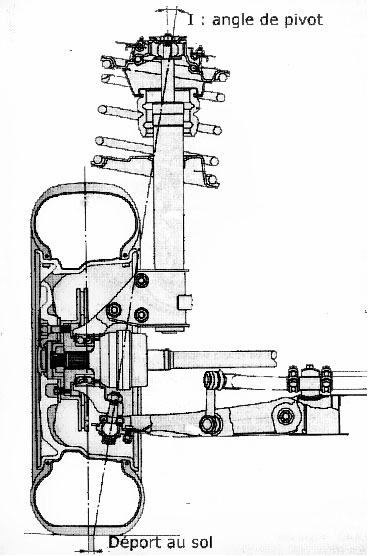
Le déport au sol
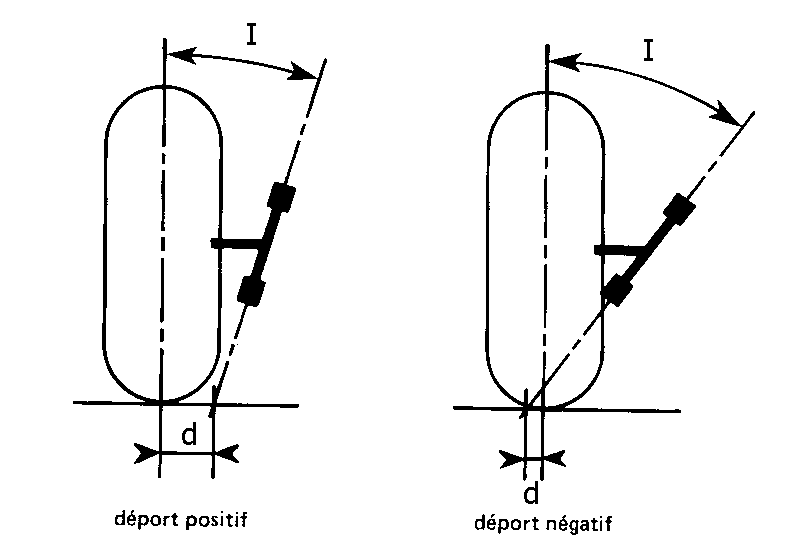
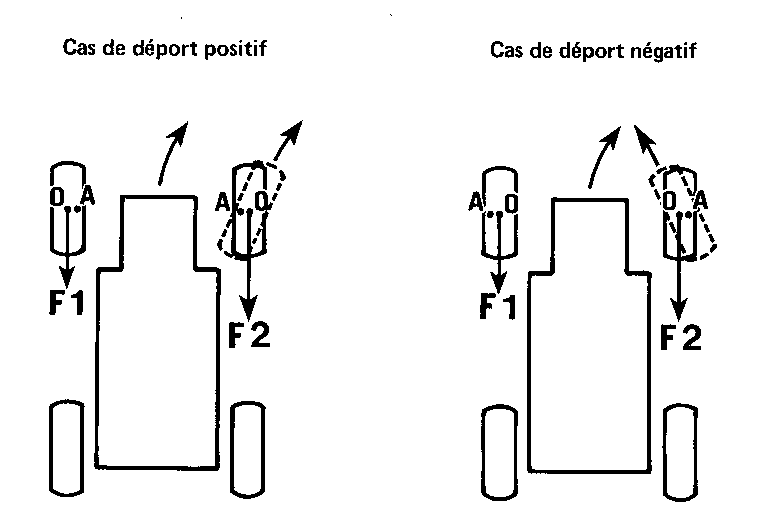
Fig43a&b
Définition : le départ au sol est la distance d, au sol, entre le plan médian du pneu et l'axe de pivotement.
Inconvénients :
Le déport entraîne une fatigue importante de la fusée, la résistance au roulement a tendance à faire ouvrir la roue, les inégalités de la route entraînent une instabilité de la direction.
Angle pivot fig44
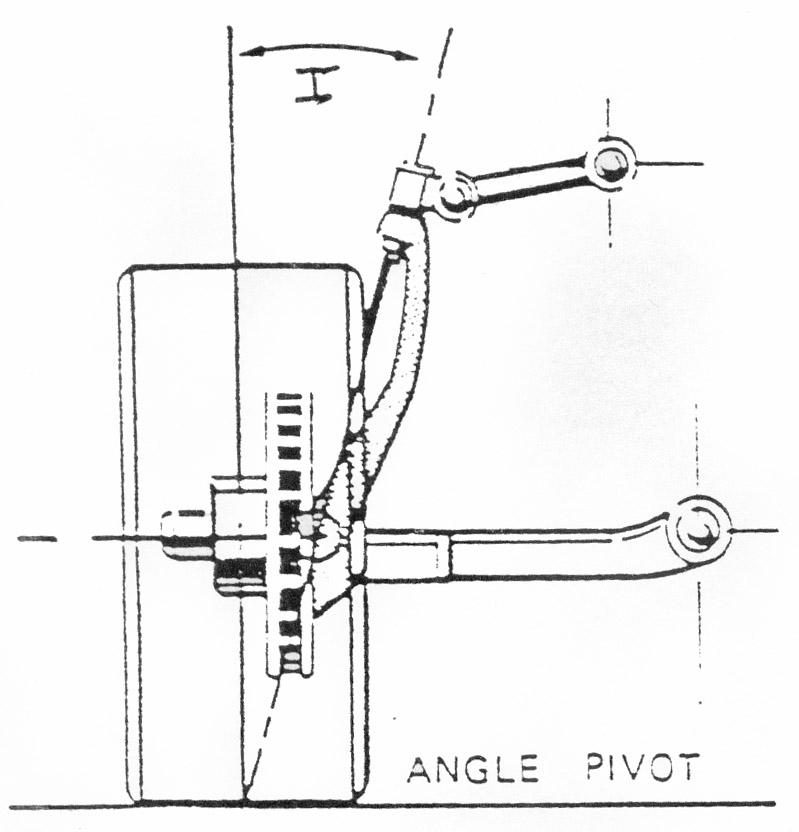
Définition :
L'angle de pivot est l'angle que fait l'axe de pivot avec la verticale dans le plan transversal du véhicule, Il passe par le centre des rotules supérieures et inférieures d’un porte moyeu.
Dans le cas d'un système MAC PHERSON fig 45
Il passe par le centre de la fixation supérieure de l'amortisseur et le centre
de la rotule inférieure.
POURQUOI L'ANGLE D'INCLINAISON DE PIVOT ?
1°) Il diminue le déport donc assure la stabilité de la direction,
2°) Il participe avec le déport au sol au rappel des roues en ligne droite (soulèvement du véhicule en braquage),
3°) Le déport négatif maintient la trajectoire du véhicule lorsque le freinage est inégalement réparti.
COMMENT REGLER L'ANGLE D'INCLINAISON DE PIVOT ?
L'angle d'inclinaison de pivot n'est, en général, pas réglable. Il est défini au moment de la conception du porte‑moyeu.
POURQUOI MODIFIER L'ANGLE D'INCLINAISON DE PIVOT ?
Si le véhicule est bien conçu, il n'y aura pas lieu d'intervenir dans la modification de l'angle d'inclinaison de pivot. Toutefois, lors d'un changement de conception des pneumatiques qui équipent le véhicule, de compétition par exemple, il sera nécessaire de conjuguer les effets de l'angle d'inclinaison de pivot avec ceux de la chasse et du carrossage pour obtenir le maximum d’efficacité du pneu.
L’ANGLE INCLUS (fig46)
Définition :
L’angle inclus correspond à l'angle de pivot + l'angle de carrossage + 90°Compte tenu que le porte fusée ne forme qu’une seule pièce et que l'angle de 90° reste constant, certains constructeurs ne tiennent pas compte de ce dernier et définissent l'angle inclus tel que : CA + PI = angle inclus
Lors d'un contrôle, si l' angle inclus est mauvais, on constatera que le porte moyeu est faussé.
ANGLE DE CARROSSAGE fig 47
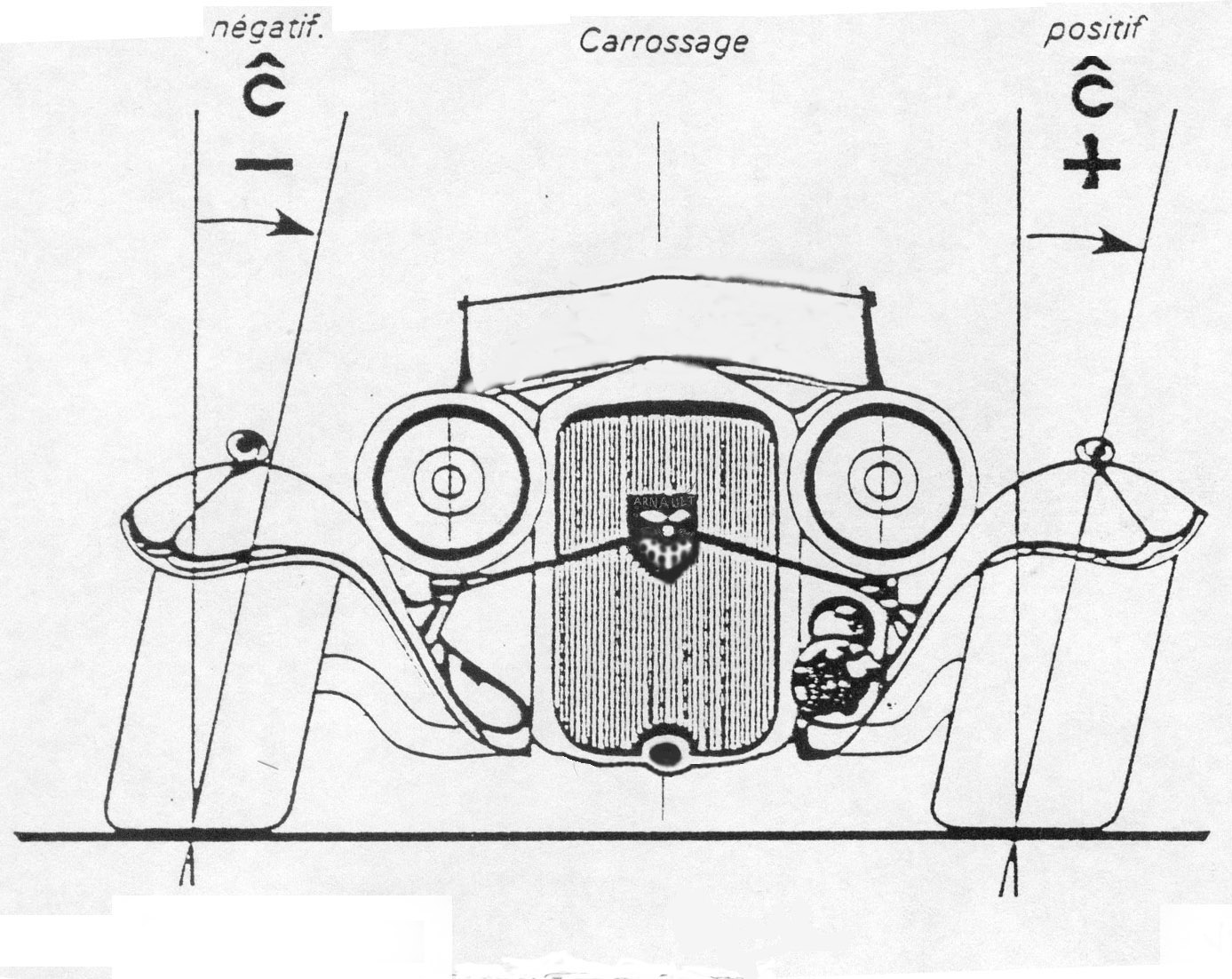
Définition :
C’est l'angle que fait la roue avec la verticale dans le plan transversal du véhicule.
POURQUOI L'ANGLE DE CARROSSAGE? (Positif ou Négatif)
1°) L'angle de carrossage stabilise la direction
2°) Il permet au pneumatique de fonctionner dans une position favorable à une meilleure adhérence en virages serrés et en courbes rapides (voiture de compétition),
3°) En réglage positif, par inclinaison de la fusée, il permet de réduire le déport au sol.
COMMENT RÉGLER LE CARROSSAGE?
1°) Système MAC PHERSON:
Sur les voitures de série, il n'est, en général pas réglable.
Sur les voitures de course on
trouve différents types de réglages :
Un
excentrique ou une platine au niveau de la fixation supérieure. Fig48a, 48b
On trouve souvent une platine avec des trous oblongs qui font varier le carrossage et parfois la chasse en même temps. Ce réglage fait aussi varier la géométrie de suspension.

Réglage
par excentrique sur porte moyeu ou jambe de force. Fig34
Une came fixée soit sur le porte moyeu soit sur les pattes de fixation de la
jambe de force (souvent l’amortisseur) permet de faire varier l’angle de
carrossage sans altérer les autres angles mais en changeant un peu la
longueur de la fusée, fig 49
Réglage par excentrique sur triangle inférieur.
fig. 50 (variation dans 2 dimensions),
e) fig 51 (variation dans 1
dimension)
Moins courant car il s’applique plus difficilement sur les suspensions des roues
motrices à cause des variations que cela entraîne pour les arbres de
transmission, on le rencontre parfois sur les trains avant d’une propulsion. Le
changement de carrossage entraîne aussi une modification de la géométrie de
suspension.
f) Réglage par variation de longueur du triangle inférieur. Fig 52
g) Fig 53
Le triangle
inférieur est souvent réalisé par un bras et un tirant (parfois la barre anti
roulis).
Le bras est rendu réglable par un système de 2 filetages inversés qui permettent
de réduire ou d’allonger la longueur du bras. Système plutôt réservé au train
avant des propulsions, mais parfois utilisé aussi à l’arrière de traction,


(fig. 54 de train Av et Ar de Ford Escort RS Turbo).
Ce réglage modifie la géométrie de suspension.
CONSÉQUENCES DES RÉGLAGES :
Cas a) Le déplacement du point supérieur sur la caisse entraîne une variation
géométrique pouvant entraîner plusieurs modifications.
1) Modification de la position du point RC donnant une plus grande variation de
carrossage en pompage et une moindre en roulis.
Par contre augmentation du phénomène de pompage en appui du à la variation
verticale de RC (Tg plus verticale).
2) Dans le cas d’un essieu moteur, la modification peut entraîner une variation de longueur des transmissions ; il faut donc vérifier quelles sont toujours compatibles avec les débattements.
3) Dans le cas d’un essieu directeur, il faut vérifier que les variations de pincement en débattement restent admissibles sinon il faut repositionner la direction. (Plus la direction est proche du triangle inférieur, moins il y a de changement de variation de pince après modification).
Cas b) Le mouvement du porte moyeu par rapport à la jambe de force produit un
phénomène de même genre que le cas « a » mais moindre.
Les variations pompage et roulis sont à l’inverse de « a ».
Par contre nous avons une variation de longueur fusée (dans le cas ou l’on
augmente le carrossage négatif) qui réduira les efforts au volant en virage,
freinage et accélération ; il faudra aussi vérifier que les variations de pince
restent compatibles (selon que le bras de direction est sur le porte moyeu ou
sur la jambe de force).
Cas c) Pour un même carrossage, il est possible d’avoir 2 hauteurs de centre de
roulis différentes.
Cela permet d’avoir un comportement différent en fonction du choix de hauteur,
mais il faut faire attention que celui-ci ne supprime pas le gain amené par le
changement de carrossage.
Dans la mesure du possible, on choisira toujours la position qui relève le
centre de roulis.
Cas d) Cette solution économique, est d’une grande rapidité de mise en œuvre grâce à des rotules montées sur une entretoise à doubles filetages inversés.
Nous nous retrouvons dans le même cas que « a » mais avec l’avantage d’un
triangle inférieur plus long (quand on augmente le négatif).
« Pour une suspension Mac Pherson, plus le triangle inférieur est long,
meilleur est le fonctionnement de la suspension. »
Sur un train avant, une modification de la longueur de biellette de
direction est impérative, surtout si elle est située près du triangle inférieur.
SUSPENSION à DOUBLE TRIANGLE :
Réglage
par la rotule du triangle supérieure ou par celle du triangle inférieur côté
porte moyeu.
Ce type de réglage change un minimum de choses dans la géométrie, attention
toutefois aux variations de pincement qui pourraient bouger selon le
positionnement de la biellette de direction par rapport au triangle en
question.
Le fait d’augmenter le carrossage négatif réduit la longueur du triangle
supérieur ou augmente celle du triangle inférieur et améliore la variation
de carrossage en roulis (moins de prise de positif en roulis), augmente un
peu les variations de carrossage en pompage (chauffe des pneus en ligne
droite) et surtout garde la même hauteur de centre de roulis.
Réglage
par le porte moyeu.
Ce système est apparu en F3000 puis fut adopté par la F3 pour enfin être
vulgarisé par la FR2000.
Il représente le gros avantage de ne pas faire varier la géométrie de la
suspension et d’être simple et rapide car il n’y a que des cales à changer.
On notera quand même que, hormis le carrossage, la hauteur de caisse, la
longueur fusée (donc le couple de rappel au volant en appui), la pince et la
voie varient et que si l’on peut régler la hauteur de caisse et la pince, le
couple de rappel au volant et la voie ne sont pas réglables (au moins dans
le cas de la FR2000).
Pour les autres formules, la liberté de réglages permet de travailler à voie
et/ou à longueur de fusée constante.
Il faut savoir que lorsque l'on augmente le carrossage négatif cela adoucit
le rappel de la direction par réduction de la longueur de fusée et par la
diminution de la surface de contact du pneu au sol.
Le système de réglage de carrossage ne faisant varier que le carrossage n’existant pas encore, il est important de bien connaître le système en place sur la voiture afin de tenir compte des effets secondaires entraînés par un changement de carrossage et de pouvoir appréhender les résultats récupérés en fonction de l’importance de tous les paramètres modifiés.
N’oublions pas que la surface de
contact du pneu au sol varie beaucoup en fonction du carrossage (et d’autres
paramètres…) et que si le fait de rajouter du négatif augmente la voie théorique
(distance entre les points ou les plans de roue coupent le sol) il n’en est pas
de même de la voie réelle (distance entre les barycentres des efforts dans les
aires de contact des pneumatiques d’un même essieu) qui elle se réduit.
La réduction de la voie intervenant dans les moments de transfert en roulis,
cela peut remettre en cause les réglages anti roulis.
POURQUOI MODIFIER LE CARROSSAGE ?
Partant du principe qu’un pneu doit toujours rester perpendiculaire au sol quelque soit les conditions dans lesquelles il se trouve, on choisira l'angle de carrossage statique pour compenser toutes les variations pouvant se produire dans la phase où la voiture se trouvera en appui, et que l'angle de carrossage final par rapport au sol soit le mieux adapté au rendement maximal du pneumatique.
Il serait utopique de croire que cela est possible !
Nous serons en général amenés à chercher le moins mauvais compromis possible.
Le carrossage statique sera en général négatif et devra compenser :
Les variations de carrossage de la suspension en roulis. (elles vont toujours dans les sens du positif sauf pour les R8G/Alpine, Mercédes avec pont à articulation centrale, Porsche bras AR à articulation centrale, Vespa 400, Simca 1000.)
Les déformations du pneumatique lui-même.
Les déformations élastiques des jantes, surtout les démontables.
Les déformations élastiques des pièces de suspension et du châssis en appui…
INCIDENCES DU CARROSSAGE NÉGATIF
Avantages :
Abaissement du centre de gravité, surtout dans les cas cités en 1) ; faible dans les autres cas.
Le pneu travaille dans de meilleures conditions en virage (surtout pour des radiaux)
Mise en température de la gomme plus rapide, permet aux pilotes capables de faire un tour parfait sans échauffement d’extraire le maximum de « grip » sur un tour ou deux…pas le droit à l’erreur !
Inconvénients :
La roue a tendance à s'écarter de la fusée d’où la nécessité de renforcer le roulement extérieur et sa fixation.
Réduction de la voie par déplacement du centre de pression dans l’aire de contact vers l’intérieur (La voie maxi est obtenue pour un carrossage nul), mais aussi dégradation plus rapide du pneu par l’échauffement concentré sur une surface plus faible.
En course, il faut revenir à des valeurs différentes car il y a plus de tours à faire.
Ne jamais oublier que le caoutchouc possède une mémoire des tortures qu’on lui fait subir et que si des efforts ou des températures trop violentes entraînent une modification de sa composition chimique (souvent fragile sur des pneus très performants), il ne retrouvera pas ses qualités premières.
Le pneu neuf a un cœfficient de frottement supérieur à celui qui se stabilise après une certaine distance de roulage.
L’écart entre ces valeurs étant beaucoup fonction du mélange de gomme utilisé.
LE PARALLÈLISME
Définition :
Le parallélisme des roues avant
est l’angle que forment les plans des roues avant avec l'axe longitudinal du
véhicule.
Il se mesure soit par un angle (avec un « Dunlop » ou autre..) soit par une
distance (à la « ficelle » ou autre.)
L’angle de pincement ou le
pincement donne une convergence des roues vers l'avant du véhicule (fig 55),
L’angle d'ouverture ou l’ouverture donne une convergence des roues vers l'arrière du véhicule.
(fig 56).
Incidence du carrossage positif ou négatif sur le parallélisme
Compte tenu de la différence de réaction du pneu entre poussée de carrossage et angle de dérive,
fig57
(fig57) (poussée de carrossage = ~10% de la poussée de dérive) l'angle de pincement ou pincement intervient comme une dérive fixe du pneumatique (tout en restant très faible : <1°), on peut considérer que l'angle de carrossage positif ou négatif ne nécessite pas de correction particulière …
Contrairement à la légende qui dit :
Incidence du mode de propulsion sur le parallélisme
‑ Traction avant donner de l'ouverture
‑ Propulsion arrière donner du pincement.
Incidence du type de déport au sol sur le parallélisme
‑ Déport positif donner du pincement
‑ Déport négatif donner de l'ouverture
En effet, l’influence de la propulsion ou du déport dépend essentiellement de la position de la crémaillère (devant ou derrière l’axe des roues AV) ainsi que de l’ensemble de la géométrie de direction et surtout des différentes élasticités des fixations des éléments de suspension et de direction !
(Voir à Variations de pincement)
En fait un pneu n’aimant pas rester sans contrainte, on lui donne en général du pincement pour un problème de stabilité en ligne droite car, il permet sur une route bombée de rester toujours sur le sommet de la route alors que de l’ouverture aura toujours tendance a entraîner la voiture hors de la route.
Dans le cadre de la course, il faut noter que la pince:
-Fait chauffer l’extérieur du pneu et dans ce cas la roue qui va prendre l’appui est déjà en contrainte dans le bon sens à l’inverse de la roue intérieure ce qui donne l’impression d’un manque de vivacité, surtout si l’on braque en fin de freinage.
-Soulève la caisse en ligne droite, ce qui peut modifier le centrage aéro en ligne droite en donnant du centrage arrière et réduisant le Cx
-Alors que l’ouverture fait chauffer l’intérieur ; donne l’impression de la vivacité en entrée de courbe car la roue intérieure est déjà en contrainte pour la courbe alors que la roue qui va prendre l’appui doit passer par un effort zéro avant de réagir.
- Donne aussi de l’instabilité au freinage en cas de variations d’adhérence et elle abaisse la caisse en ligne droite, ce qui modifie le centrage aéro vers l’avant.
La répartition entre la pince avant et arrière interviendra donc à plusieurs niveaux.
LES VARIATIONS DE PARALLÉLISME
Définition:
C'est la différence d'angle d'ouverture ou de fermeture des roues d'un même essieu, ces valeurs étant prises à différentes positions hautes et basses de la caisse.
Avantage:
Ce système permet d'introduire sur l'essieu avant ou arrière des variations au freinage, en accélération ou en appui qui permettront de modifier le comportement de la voiture.
1°) Pour une voiture de compétition : d'introduire une modification de la trajectoire selon les variations AV/AR des roues en appuis ou d’améliorer la stabilité au freinage.
2°) Pour une voiture de tourisme : conjuguées avec les variations de l'essieu arrière, une meilleure stabilité au freinage, et une tendance sous-vireuse en virage qui est plus facile pour le conducteur moyen.
a ‑ Les roues AV doivent aller dans le sens de l'ouverture en compression et dans le sens de la pince en détente.
La valeur de la pince en détente sera en général plus importante sur une traction pour favoriser la motricité en fin d’appui (cela dépend aussi des caractéristiques propres du pneu).
b ‑ Les roues AR doivent aller dans le sens de la pince aussi bien en compression qu’en détente pour améliorer la stabilité au freinage et aussi en courbe.
Inconvénient :
Afin que ces variations soient maîtrisées, cela implique d'effectuer la hauteur de direction ou le calage de direction au 1/10 de millimètre !
Pour l’essieu AR, cela dépend de la géométrie de la suspension et de la possibilité de faire varier la « chasse » ou « le bras de direction » du porte moyeu AR.
(Voir à Variations de pincement)
REGLAGE DE LA REPARTITION DES CHARGES AU SOL
Il est indispensable de régler la répartition des charges sur le sol.
1°) Voiture de tourisme : il n'est pas toujours possible d'avoir sur une voiture de tourisme une répartition à moins de 15 kg près (position de la roue de secours, etc.)
2°) Voiture de compétition : il est impératif que chaque roues reçoivent le même poids (à 5Kg près). En effet tout déséquilibre dans la répartition des poids entraînera un blocage au freinage ou un patinage à l'accélération de la roue la moins chargée.
PRECAUTIONS D’USAGE A RESPECTER AVANT TOUT CONTRÔLE
1 ‑ Pression des pneus,
2 ‑ État des roues,
3 ‑ État mécanique (roulements, axes, rotules ...),
4 ‑ État des amortisseurs et des suspensions,
5 ‑ Opérer sur un sol de niveau.
ORDRE LOGIQUE DU CONTROLE
1 ‑ Hauteur sous coque,
2 ‑ Pivot,
3 ‑ Carrossage,
4 – Chasse,
5 – Parallélisme,
6 ‑ Alignement des essieux.
ORDRE LOGIQUE DU REGLAGE
(Avant les opérations de réglage, débrancher un côté des barres anti‑devers)
1 ‑ Réglage des hauteurs sous coque,
2 ‑ Contrôle da la répartition des charges,
3 ‑ Réglage de la chasse,
4 ‑ Réglage du carrossage (attention aux variations de hauteur de caisse),
5 - Calage de la hauteur de crémaillère,
6 - Alignent, des essieux,
7 ‑ Réglage du parallélisme,
8 – Rebrancher les barres anti-devers en vérifiant bien qu’elles ne sont pas en contrainte.
LA SUSPENSION
CALCUL DE LA RAIDEUR D'UN RESSORT
Un ressort est caractérisé par :
a) ‑ SA RAIDEUR (k)
C'est le rapport qui existe entre la charge qu'il supporte et la déflexion qu'il subit.
k = P/d ; k s’exprime en N/M ou en kg /mm
‑ 1 kg/mm = 10 000 N/m ou à 1 000 daN/m
b) ‑ SA FLEXIBILITE (f) : C'est l'inverse de la raideur. f = 1/k ; f s'exprime en m/N ou en % (version journalistique) qui sont en fait des mm/ 100 kg
Exemple : un ressort qui a une flexibilité de 25% indique que pour une charge de 100 kg il se comprime de 25 mm.
Formule de calcul :
ka = k (l/L)2
Cette remarque nous montre que suivant l'endroit où se trouve le point d'application d'un ressort, la rigidité à la roue varie comme le carré du rapport des distances.
Exemple : soit une voiture dont la suspension est la suivante : (fig 58)
k = 4 kg/mm
l = 0,30 m
L = 0,50 m
L avec élargisseur = 0,55 m
1er cas : montage d'origine
k roue = k ressort . (l/L)2 = 4*(0.3/0.5)2 = 4 (0,6)2 = 1,44 kg/mm
Soit une flexibilité de 69 mm pour 100 kg
‑ Si l'on met un élargisseur de voie ou des jantes déportées de 5 cm, que devient la rigidité à la roue ?
2ème Cas : montage modifié
k roue = 4(0.3/0.55)2 = 1,16 kg/mm
Soit une flexibilité de 86 mm pour 100 kg
Lorsque l’on monte des
élargisseurs de voie sur une voiture, on assouplit la suspension et on diminue
la garde au sol.
Cas général : monoplaces (fig 59)
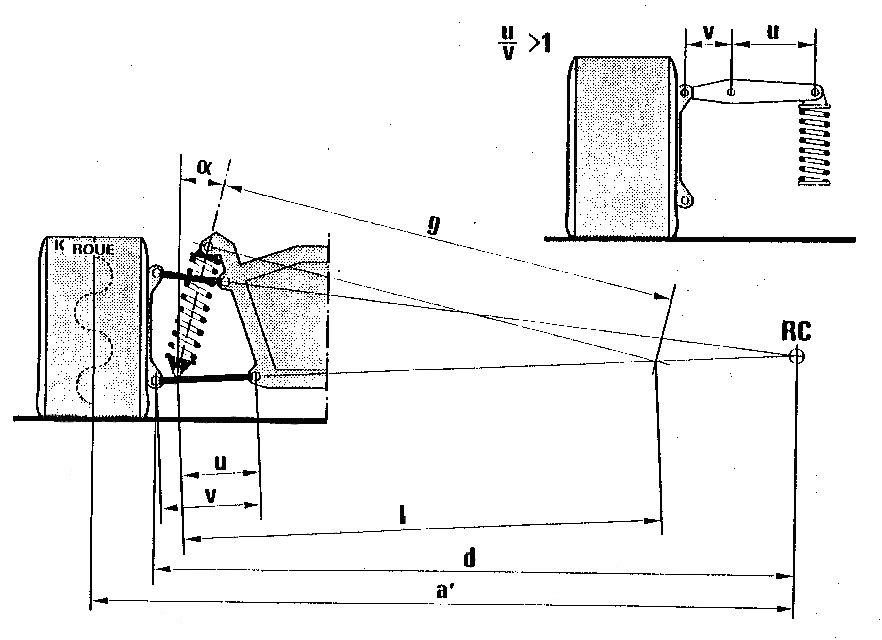
K roue = k ressort. (u/v.g/l.d/a’)2 ou k roue = k ressort.(u/v.d/a’)2.cos2 α
(pour mémoire : K roue = 1/2 K essieu)
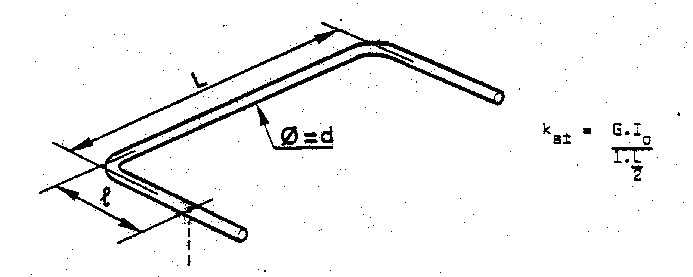
CALCUL DE LA RAIDEUR DES BARRES ANTIROULIS fig 60
Une barre antiroulis est avant tout un ressort qui n'agit que lors du roulis donc nous aurons la même caractéristique principale: la raideur.
Celle‑ci sera exprimée en Kg/d° ou en N/radian, car une barre antiroulis est, en général, une barre de torsion.
1°) kst =G*Io/l2*L en kg/radian (1° = 0,01744 radian)
kst = rigidité de la barre antiroulis
2°) Kst = kst*(V/2)2
Nous noterons qu'en roulis, c'est la demi voie qui intervient pour la raideur à la roue.
G = module de cisaillement en kg/mm2 (acier = 8000 kg/mm2)
Io=moment d'inertie polaire de la barre en mm2
Barre pleine : Io = π /2 (d/2)4
Barre creuse : Io = π /2 (D/2 ‑ d/2)4
1, L, et D en mm
Nous voyons que nous pouvons modifier la rigidité d'antiroulis, soit en modifiant
Io ‑ diamètre et la forme de la barre,
G ‑ caractéristiques de l'acier employé,
L ‑ écartement de la barre,
1 ‑ partie réglable sur la monoplace,
rapport u/v ‑ en déplaçant le point d'application sur le triangle.
Exemple : soit une barre antiroulis
d = 18 mm G = 8 000 kg/mm2
L = 800 mm 1 = 300 mm
kst = 2.G.Io/lL = 2*8000*π/2(18/2)4/300*800 = 687 kg/radian , soit 12 kg/d°
Cette rigidité s'ajoute à celle
des ressorts en roulis. 0n la transforme en rigidité à la roue de la même façon
que pour les ressorts :
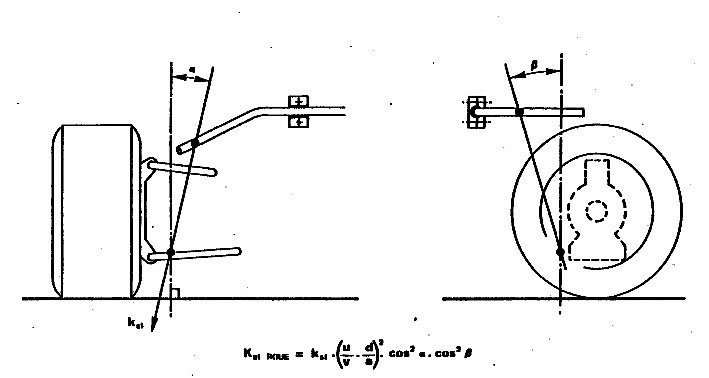
fig 61
Kst roue = kst .(u/v.d/a’)2. cos2α . cos2β
Nous avons intérêt à avoir une biellette la plus longue possible ce qui, nous permettra d'effectuer des réglages sans introduire un grand angle.
Quand on augmente le diamètre d'une barre antiroulis, sa rigidité croît rapidement. (Terme en d4)
Quand on déplace le point d’appui de la biellette, sa rigidité change suivant le sens du déplacement mais d’une manière beaucoup plus faible (réglage fin. terme en l).
Dans le cas des monoplaces avec un mono amortisseur à l’avant, type Formule Renault ou F3, l’anti roulis est fait à l’aide de rondelles Belleville qui limite le déplacement du basculeur sur son axe transversal.
La raideur anti roulis est fonction du nombre de rondelles et du sens d’empilage des rondelles. On notera aussi que la raideur donnée par les rondelles n’est pas forcément linéaire et qu’il existe une possibilité de pré charger celles-ci, retardant ainsi la mise en action de la compression des rondelles dans leur partie « ressort ».
Ne pas oublier que lorsqu’on durcit l’anti roulis d’un essieu, on transforme celui-ci en essieu rigide (donc le carrossage de la roue en appui devient égal à l’angle de roulis de la voiture et va vers le positif) et qu' à partir d’un certain niveau, c’est la structure (coque ou châssis) elle-même qui devient le « ressort ».
LES AMORTISSEURS
L'amortisseur hydraulique est un appareil fonctionnant par déplacement d'un piston dans un liquide enfermé dans un cylindre.
Cet appareil ne produit un effort que lorsque le piston acquiert une certaine vitesse par rapport au corps.
En général:
‑ La tige est reliée à la roue,
- Le corps est relié au châssis.
Ceci pour diminuer les masses en mouvement dans les débattements de suspension.
Nous distinguerons trois zones de travail :
1°) Basses vitesses: 0 à 30 mm/seconde:
Vitesse de caisse uniquement, accélération, roulis, freinage.
Les mouvements de roulis pourront même s’étudier dans la partie 0 à 10 mm/s
2°) Moyennes vitesses: 30 à 300 mm/seconde:
Hautes vitesses de la caisse ou faibles vitesses de la roue ; Zone courante de travail de la suspension.
3°) Hautes vitesses: 300 à 2500
mm/seconde:
Vitesses de roues uniquement ou passage de bosses avec envol de la voiture.
2500 mm/s étant la vitesse d’une roue franchissant un « nid de poule » !
Certaines voitures franchissant des bordures à très grandes vitesses peuvent avoir de vitesses de roues atteignant les 20 m/s !!!
Il existe différentes catégories d'amortisseurs
Les bitubes : KONI ‑ ARMSTRONG ‑ ALLINQUANT ‑ RECORD – BENDIX….
Les monotubes : DE CARB0N – BILSTEIN…
Les monotubes à réservoir séparés : Pratiquement la totalité des amortisseurs de course actuels
Nous retiendrons deux zones intéressantes
Les basses et les moyennes vitesses.
Soit une courbe d'amortissement
effort vitesse fig 62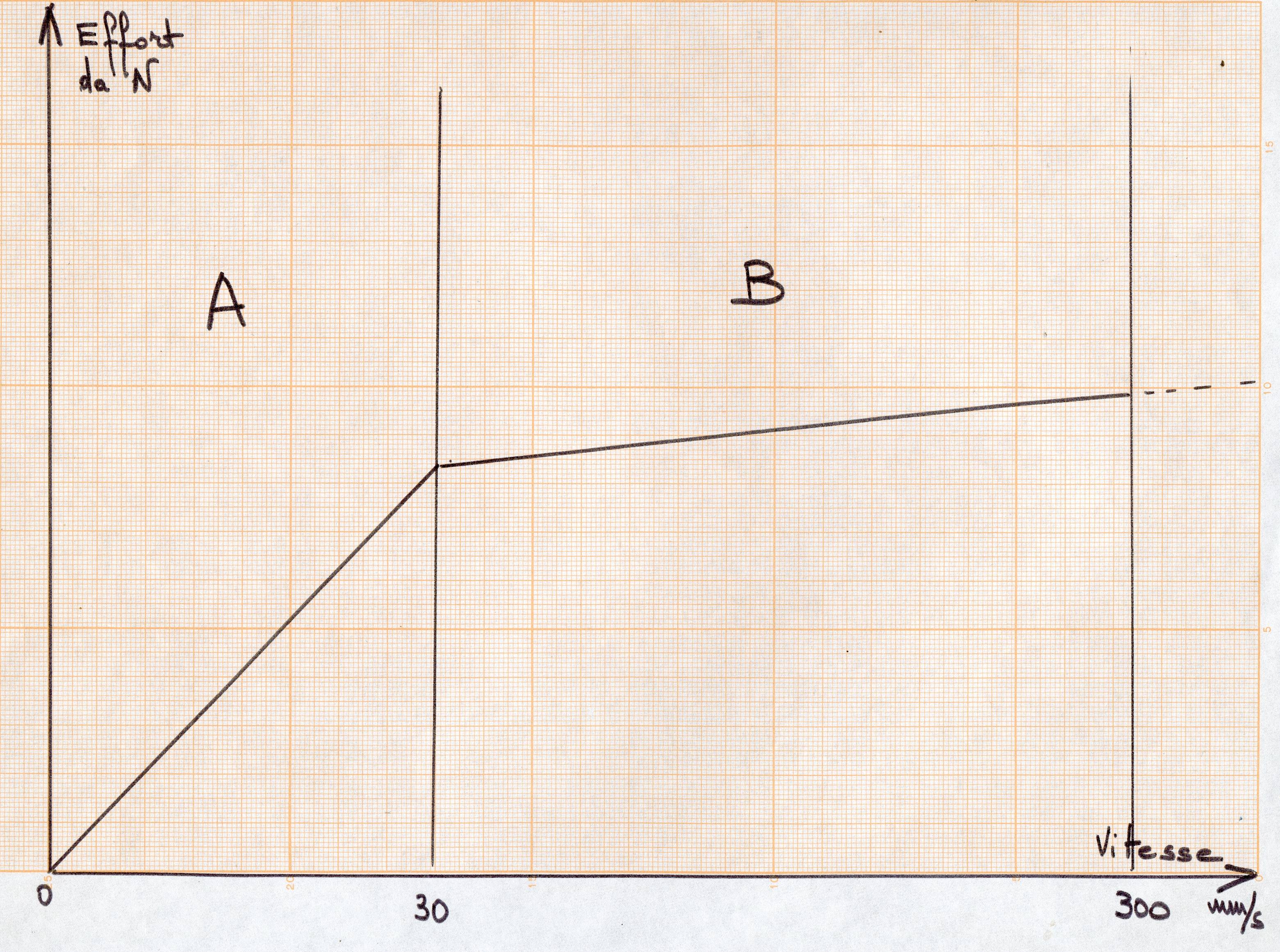
‑La partie A servira à régler l’amortissement de la voiture en évolution,
-La partie B servira plus essentiellement à régler l'amortissement de la caisse en fonction de la raideur des ressorts employés.
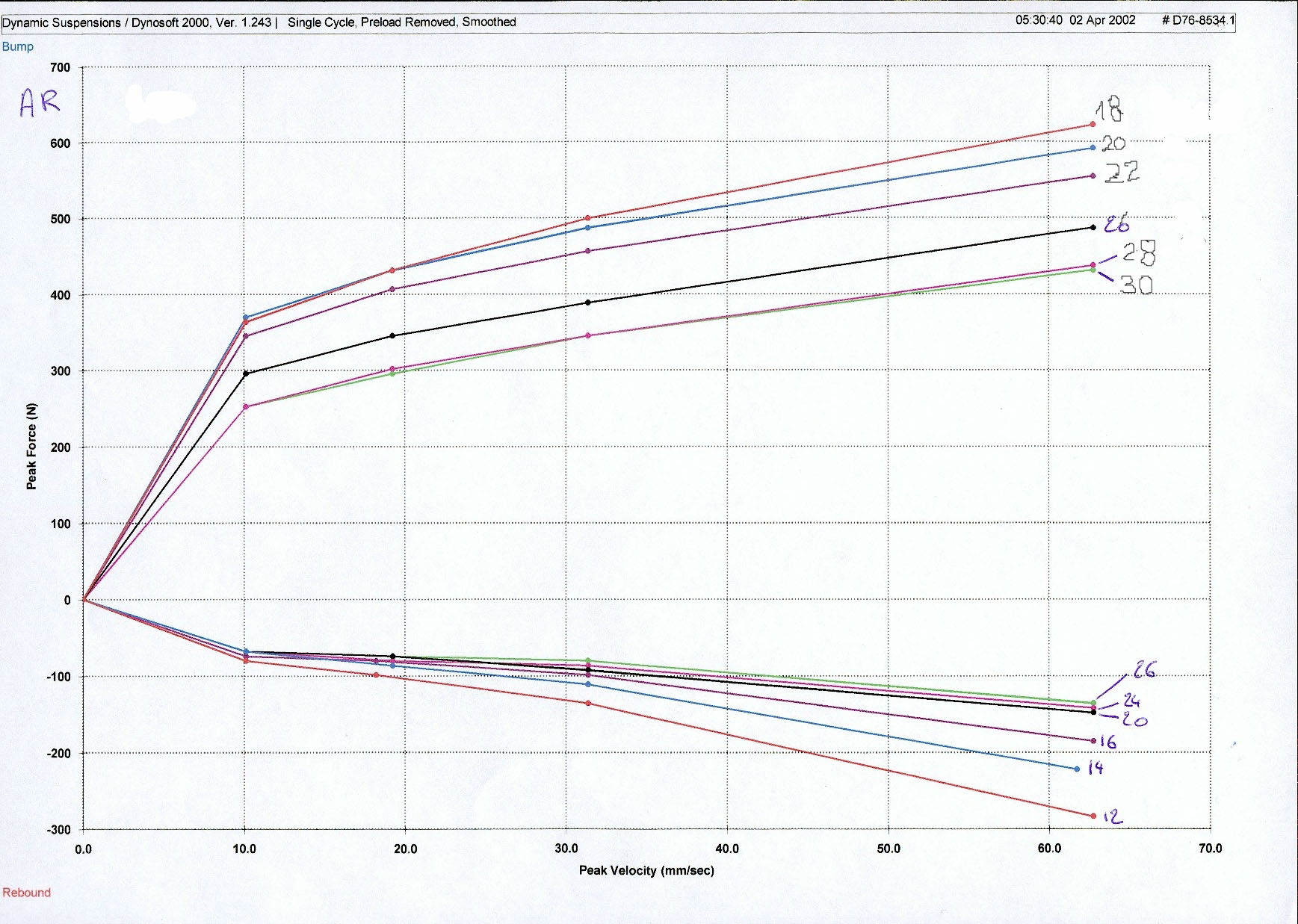
Courbes amortisseurs Formule Renault:
fig 63
S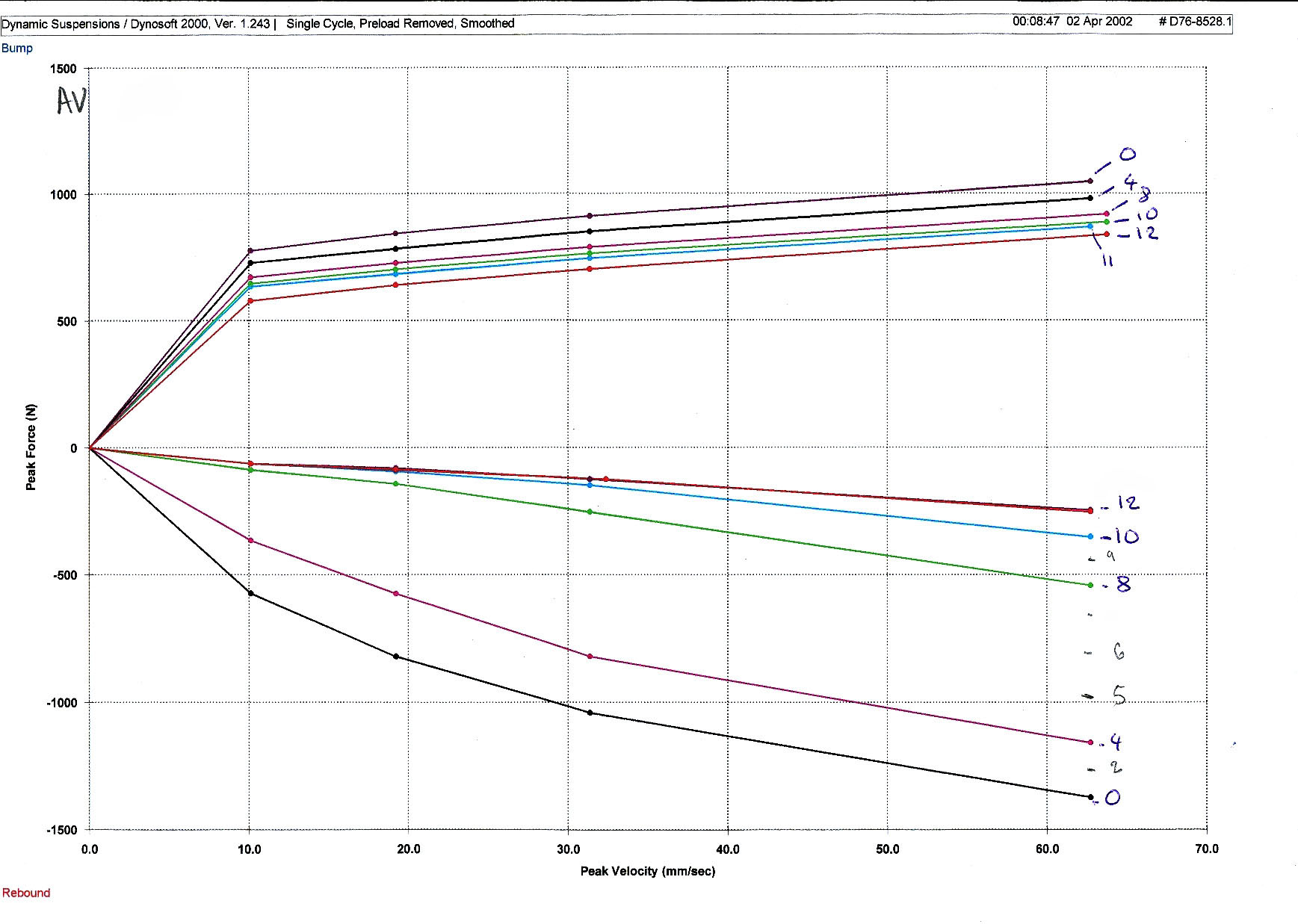 ur ces courbes la partie supérieure représente la compression et la partie
inférieure la détente.
ur ces courbes la partie supérieure représente la compression et la partie
inférieure la détente.
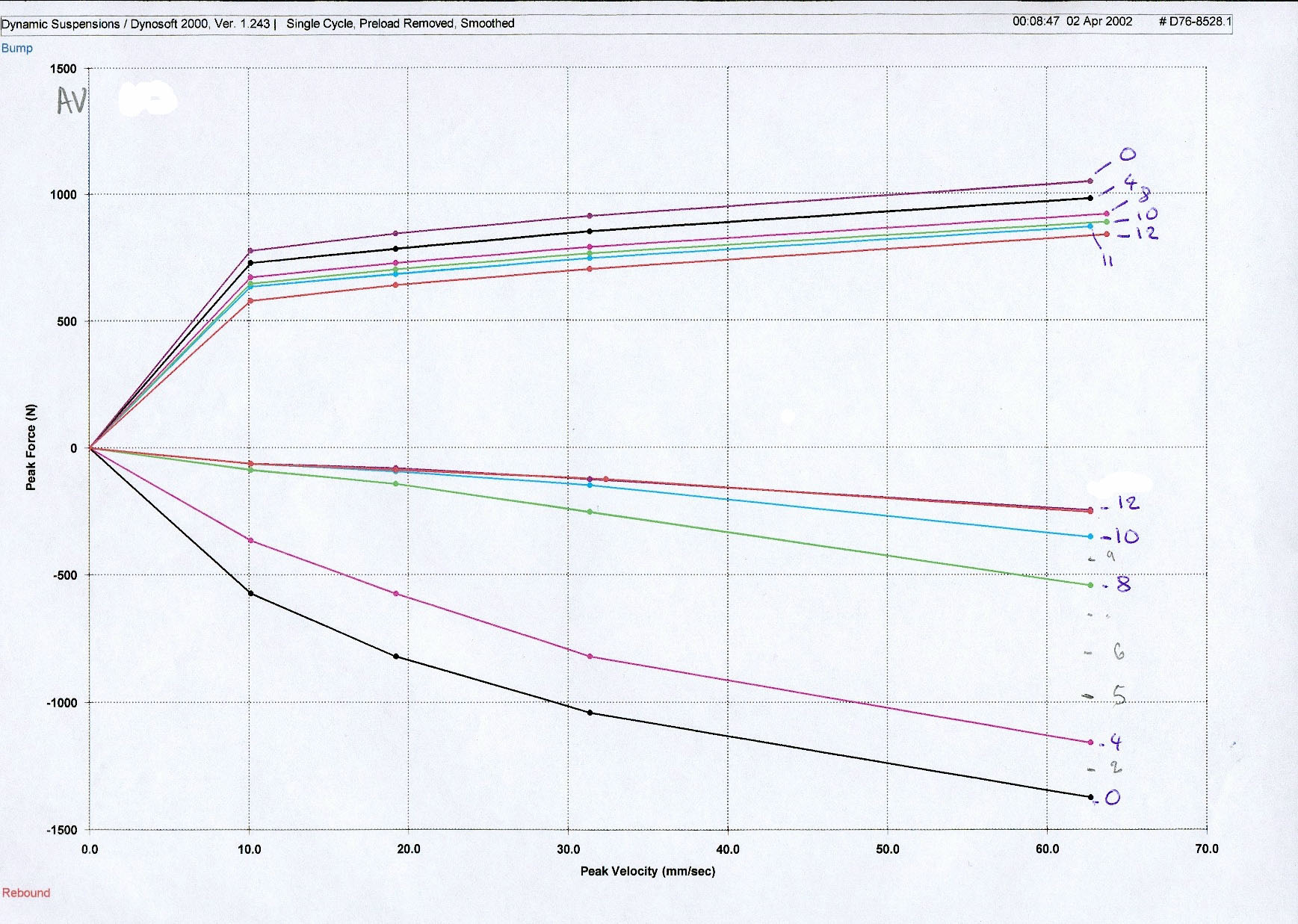
Les chiffres représente les crans de réglages : 0 étant le plus dur et 30 le plus souple.
fig 64
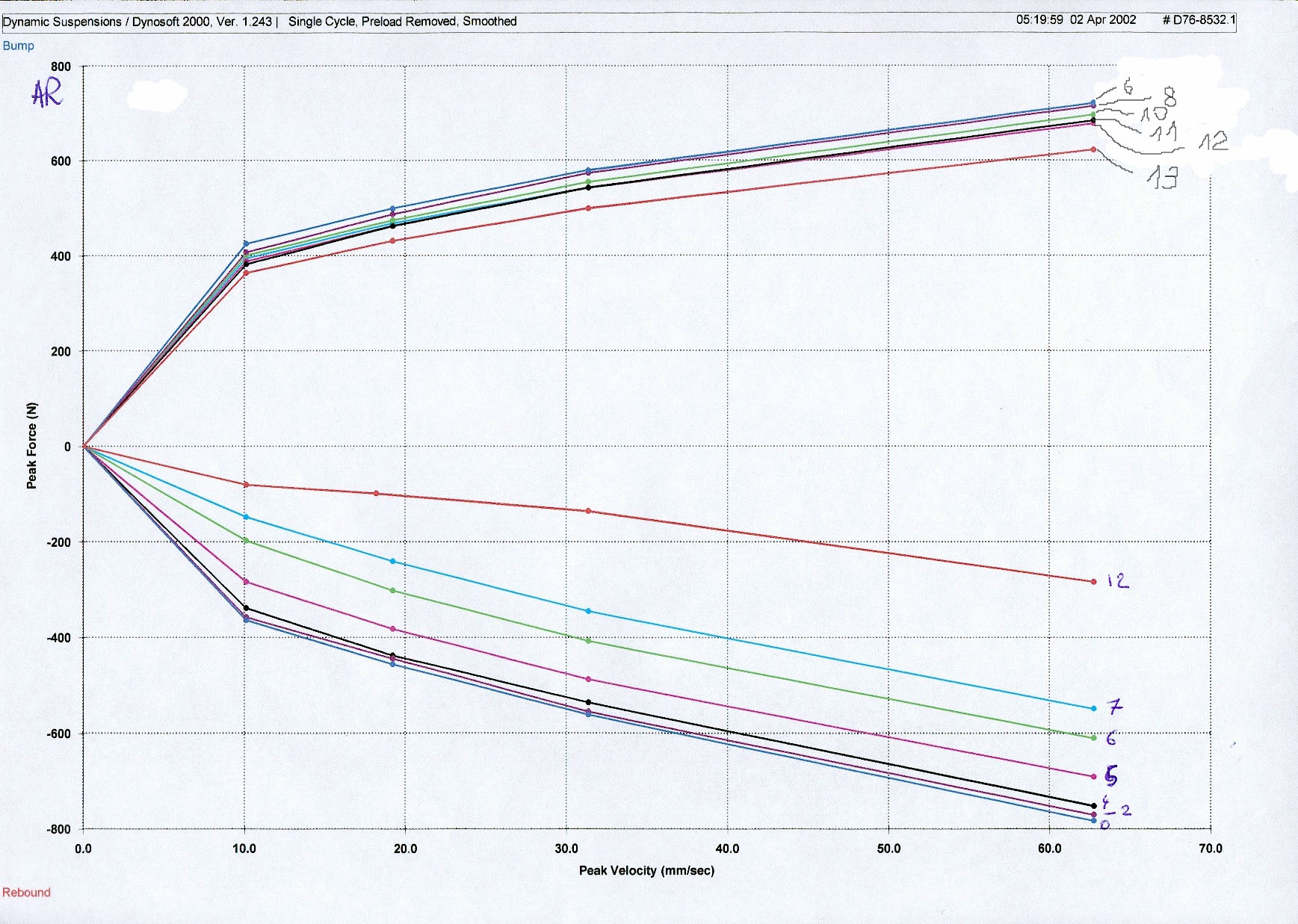
fig 65
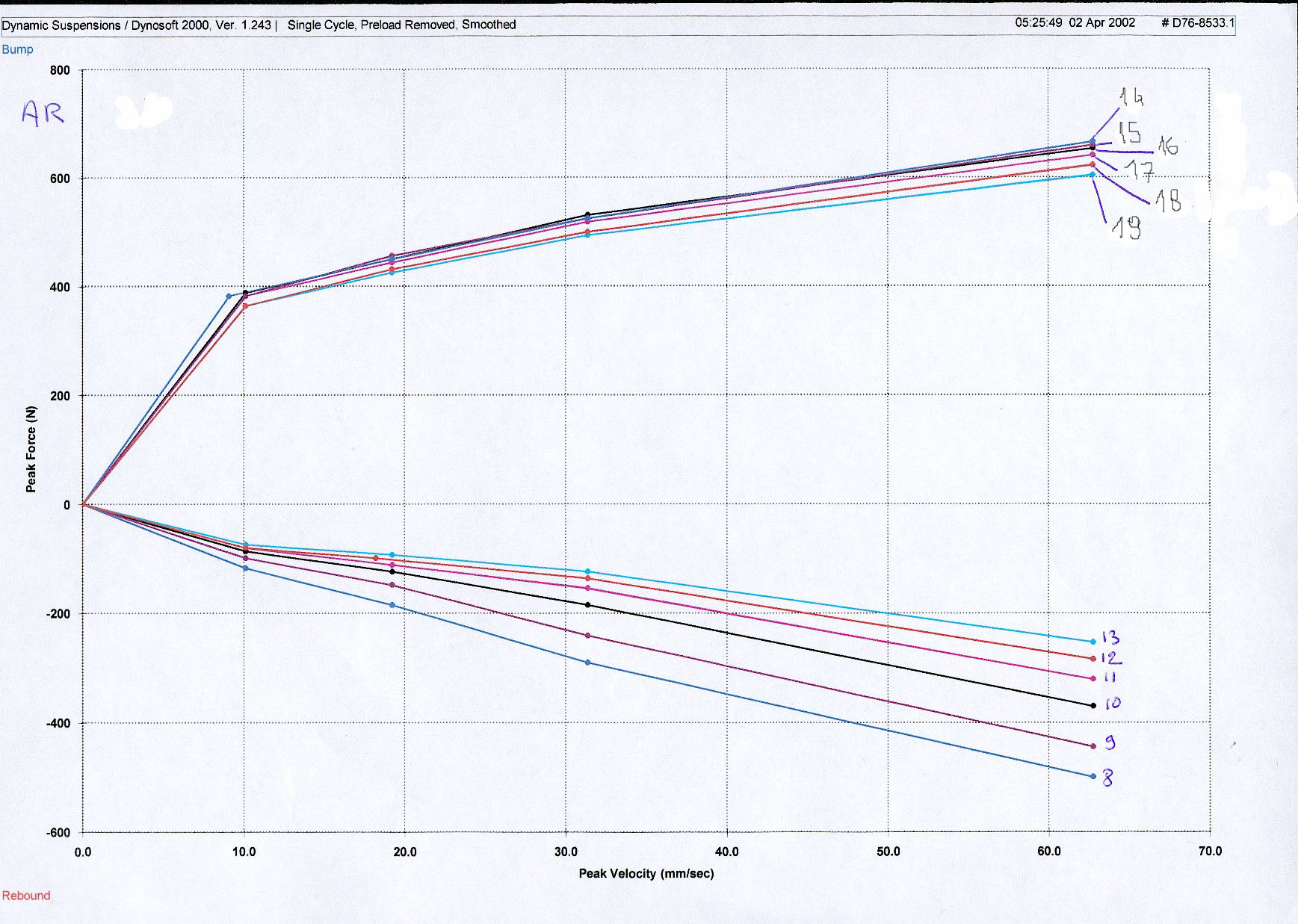
fig 66
fig : 67
Les mesures embarquées actuelles permettent de connaître les vitesses de travail des amortisseurs en place, mais il faut être prudent car cela ne donne pas forcément une vue exacte de ce qui se passe à la roue.
En effet, les capteurs de déplacement qui mesurent la longueur de l’amortisseur ne prennent pas en considération les mouvements de la caisse par rapport au sol.
Les amortisseurs sont généralement connus jusqu'à des vitesses de 1 m/s et peu de gens les étudient au-delà.
Il faut cependant noter que lors de mon passage chez SIMCA de 67 a 70 nous avions mesurés des vitesses de roues atteignant 2,5 m/s lors de passages dans des « Nids de poule »!
Un ami a qui j'avais confié ces chiffres et ne voulant pas le croire, fit un test sur une roue Av de F1 et découvrit que lors des montées sur les bordures... c'est 20 m/s de vitesse verticale que prenait la roue !!
A cette vitesse là, l'amortisseur se transforme en vérin hidraulique et c'est la caisse qui prend tout le choc...!
Ces remarques sont valables aussi pour les voitures de Rallye-Raid dans « la caillasse »!
Pour combattre ce phénomène, il faut « ouvrir en grand » les clapets de compression a partir d'une certaine vitesse tige/corps afin de limiter l'effet vérin!
Sans oublier que c'est plus facile sur un amortisseur avec 400 mm de course
que sur un qui a 10 mm.
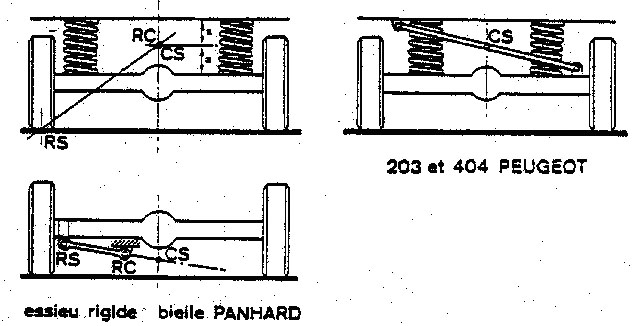
GÉOMÉTRIE DES TRAINS ROULANTS
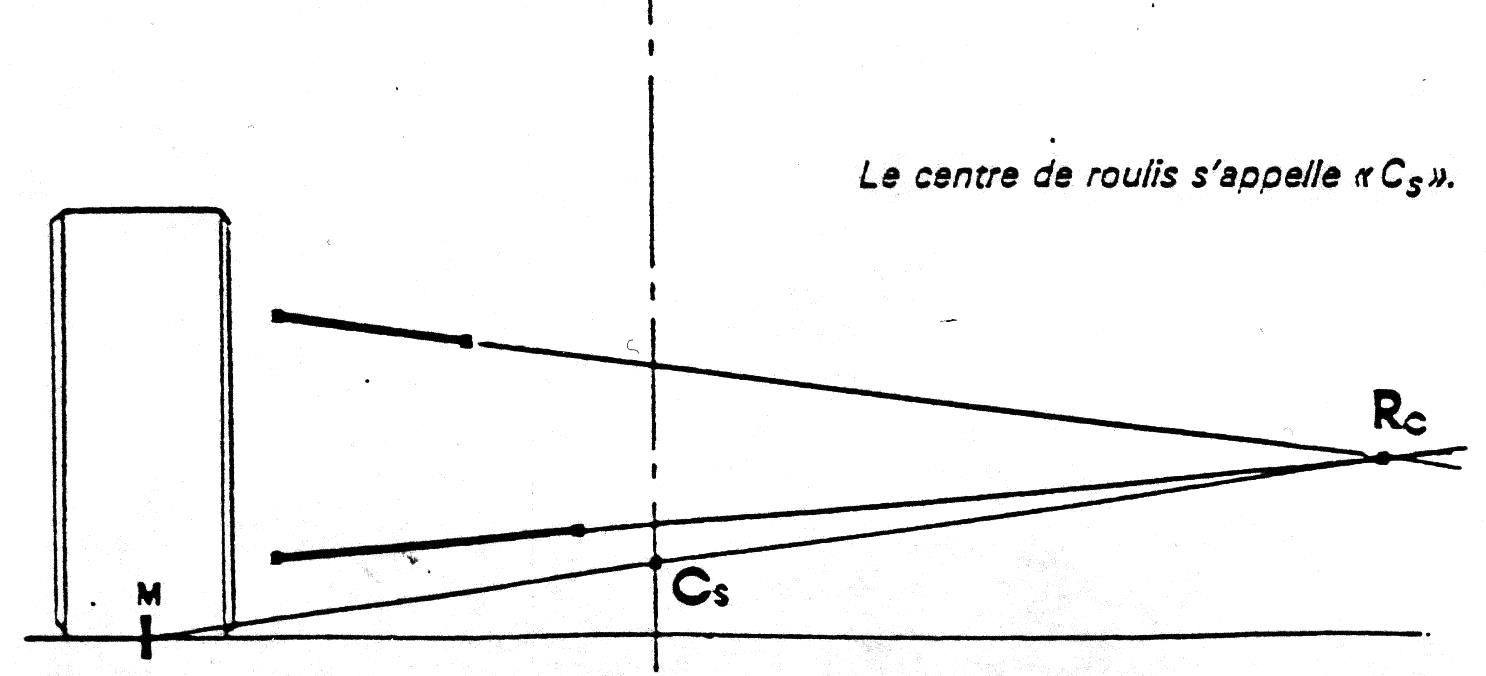
fig.68
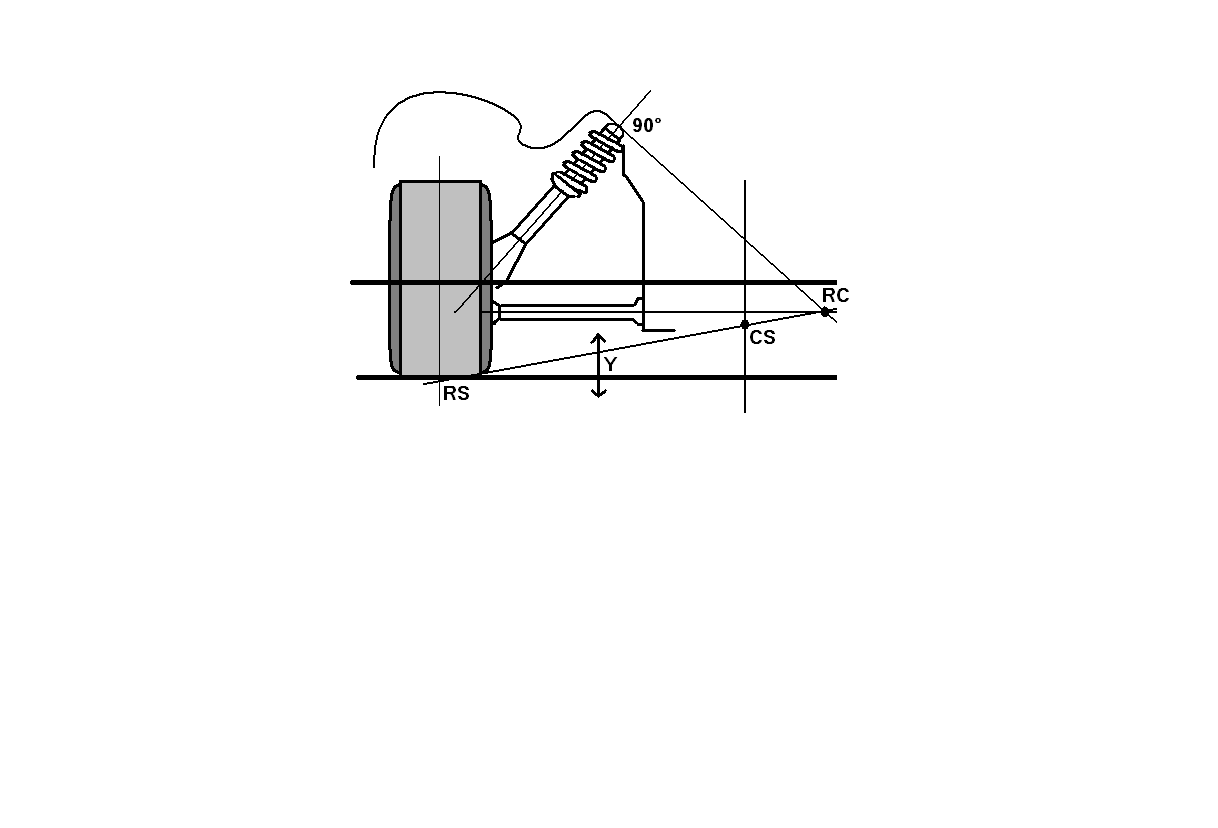
Indications sur les principales géométries existantes et sur la détermination de leur centre de roulis CS (centre instantané de rotation du châssis par rapport au sol).
- RS ‑ centre instantané de rotation de la roue/sol
‑ RC ‑ centre instantané de rotation de la roue/châssis
‑ CS ‑ centre instantané de rotation du châssis/sol
(Par définition, ces centres sont toujours alignés 3 par 3).
ESSIEU RIGIDE : fig 69
ROUES INDÉPENDANTES : fig70
2CV et 3CV CITROEN, R6 ‑ R4 ‑ R5 ‑ R16
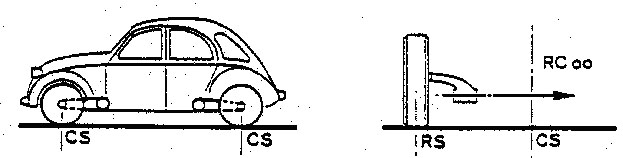
ESSIEU OSCILLANT : fig 71
HILLMAN IMP AV
R8, ALPINE
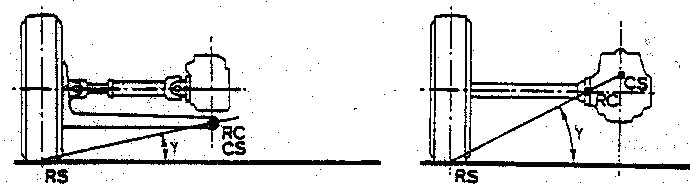
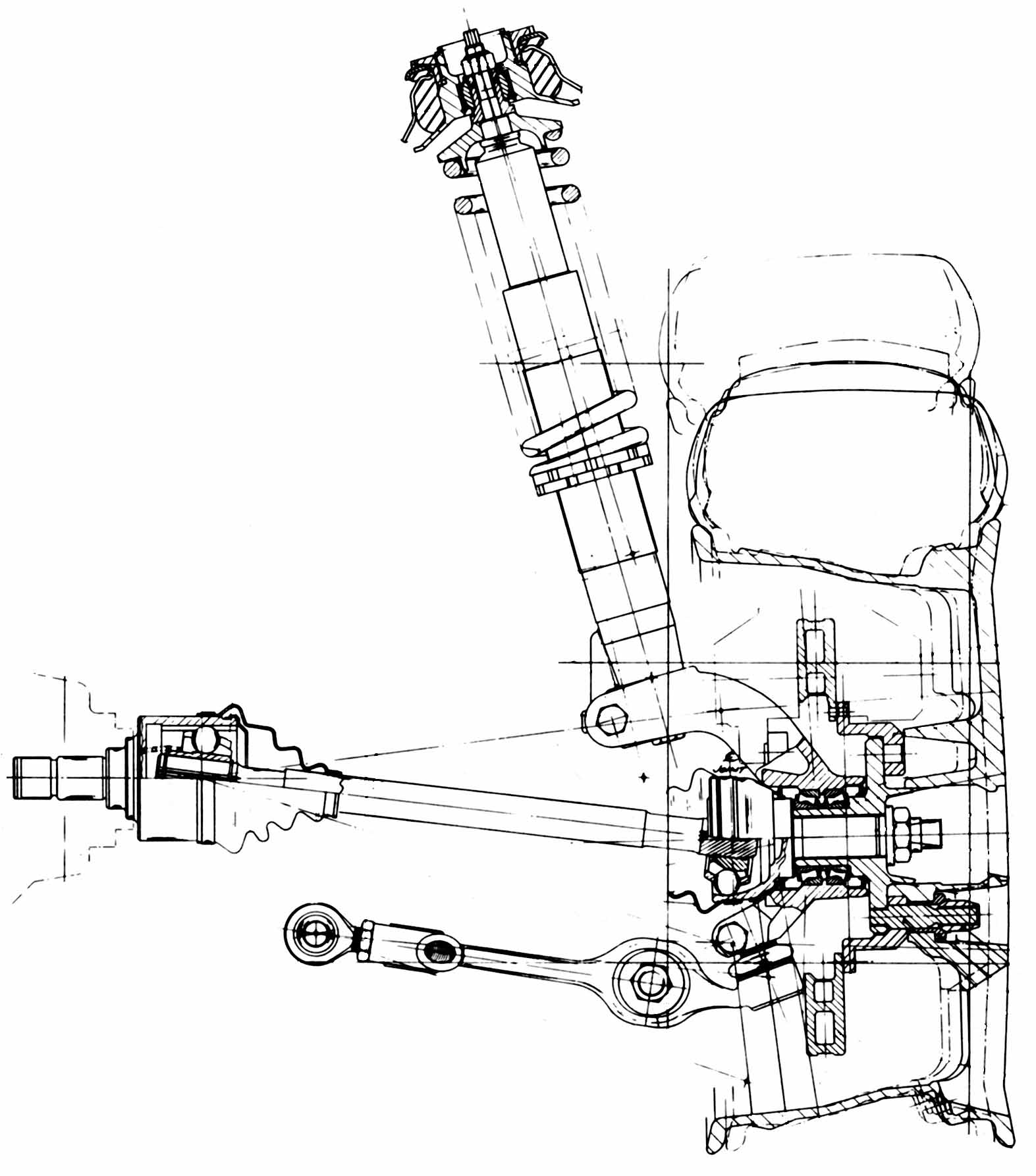
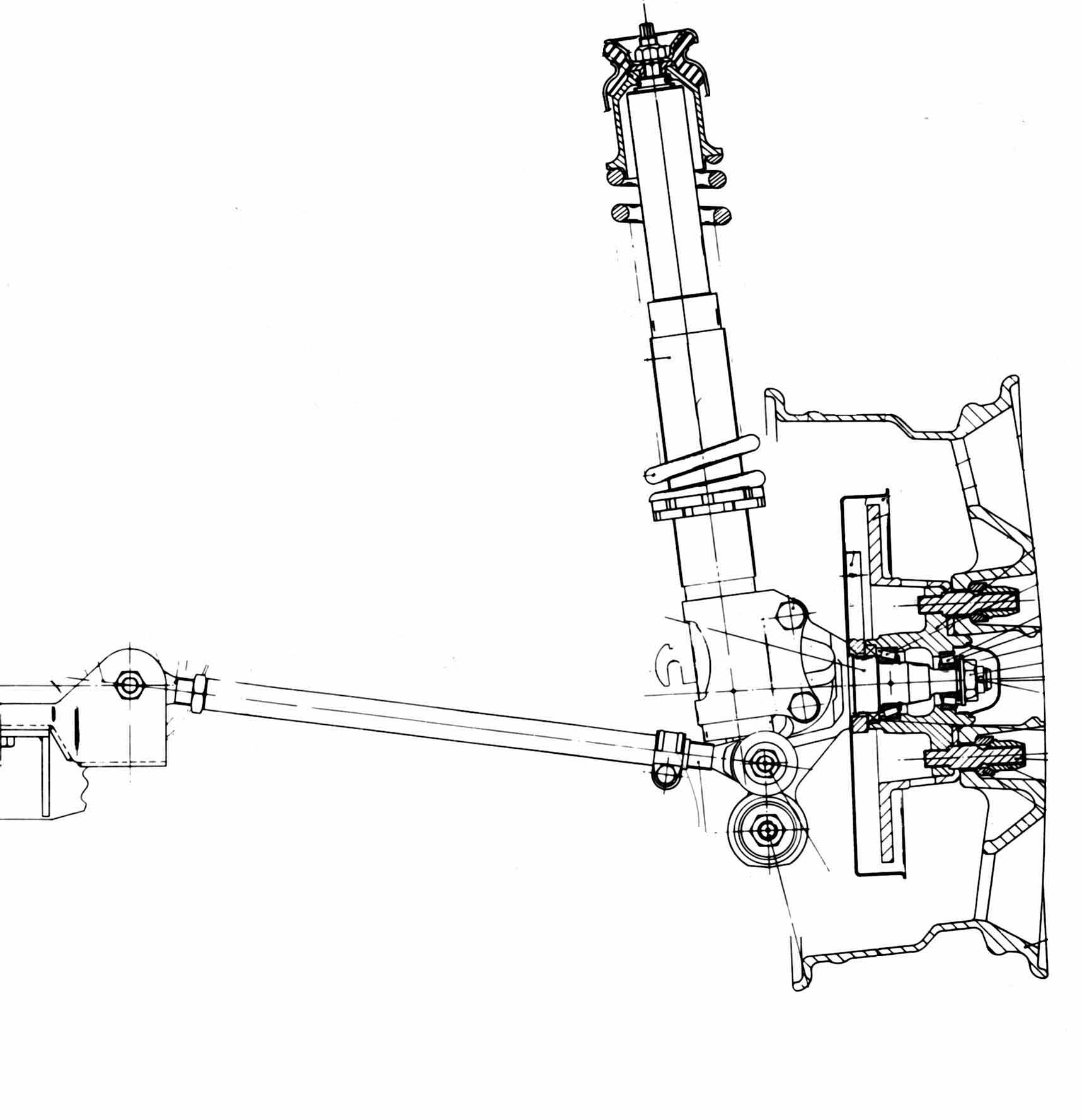
SYSTEME MAC PHERSON : fig 72
Définition :
Le système de suspension est dit "MAC PHERSON" lorsque 1e pivot de direction est en même temps un système coulissant que, pour des raisons de poids et de prix de revient, on a utilisé comme amortisseur.
Ce système demande pour fonctionner correctement d'avoir le triangle inférieur le plus long possible et si possible jamais perpendiculaire à l'axe du coulisseau.
Ce système est simple et économique mais ne présente pas beaucoup de possibilités de géométrie de suspension.
QUADRILLATERE DEFORMABLE : fig 73
C'est le système le plus courant que l'on rencontre sur toutes les voitures de course "Sport et monoplaces".
VARIATIONS GEOMETRIQUES
Les différents systèmes adoptés pour la réalisation des suspensions produisent des variations de diverses natures, certaines sont inhérentes au système adopté.
On étudiera:
a ‑ les variations de voie,
b ‑ les variations de carrossage,
c ‑ les variations de pincement.
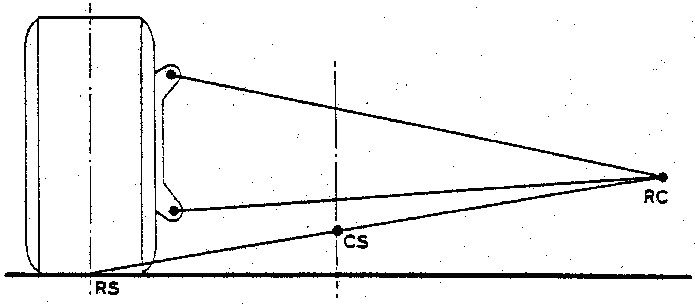
VARIATIONS DE VOIE : fig 74
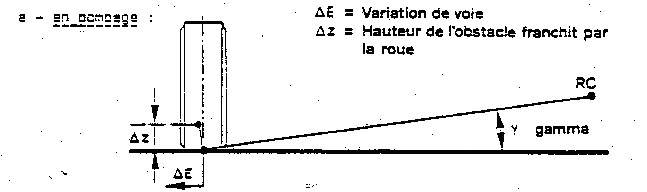
Lorsqu'il y a déplacement vertical de la roue par rapport au châssis ou du châssis par rapport à la roue, il y a déplacement du centre de l'aire de contact que l'on appelle ΔE tel que :
ΔЕ = Δz.tgγ
On cherche à avoir une tgγ la plus faible possible lorsque l'on utilise des pneus très directeurs (pneus RACING) car tout déplacement latéral pendant la rotation implique une poussée de dérive.
b – en roulis :
Les variations de voie se compensent et sont pratiquement nulles (quelques 1/10 pour une voie de 1,300 m).
VARIATIONS DE CARROSSAGE :
a ‑ En pompage: fig75
Pour un déplacement du châssis (vertical) Δz, nous avons un déplacement angulaire du plan de la roue par rapport au sol tel que
Afin d'éviter les variations de poussée de carrossage des pneus et surtout afin de conserver les roues perpendiculaires au sol en phase d'accélération ou de freinage, on réduira Δβ en augmentant au maximum a' c'est‑à‑dire en ayant des triangles parallèles.
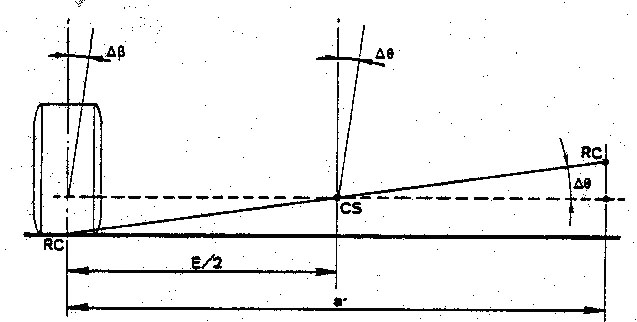
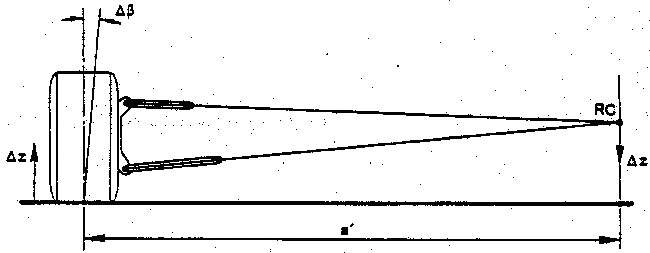
b – en roulis: fig 76
Δβ : variation de l'angle de carrossage
Δθ : angle de roulis
a’ : longueur entre le plan médian de la roue et la projection verticale au sol du point R.C.
Lors du roulis de la voiture, le point RC qui est lié au châssis effectue un déplacement Δz. Ce déplacement de RC entraîne une variation de carrossage, qui est fonction de la position de RC par rapport à l'axe de la voiture.
Δβ = (1- E/2a’).Δθ
Remarque :
Nous voyons apparaître deux points importants
‑la variation de voie est fonction de la hauteur de RC par rapport au sol (tg γ),
‑la variation de carrossage en roulis est fonction de l'abscisse (a’) de RC par rapport à la roue.
Par ailleurs, on constate que le point RC n'est pas fixe. Il se déplace sur une courbe dont la pente de la tangente est fonction du rapport de longueur des bras de suspension.
DROITE DE BOBILLIER : fig 77
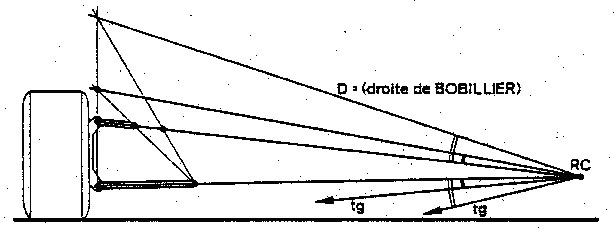
On constate que l'on peut faire varier la pente de la tg dans de grandes proportions en ayant des bras de suspension de longueurs différentes, et la distance (a’) par la convergence des bras. On aura (a’) maximum, pour des débattements autour de 1a position assiette de la voiture et minimum pour des mises en appui de la suspension en courbe.
Le cas des essieux oscillants ‑ RENAULT 8 ‑ nous montre que l'on a intérêt à avoir RC à l'intérieur de la demi voie.
VARIATION DE PINCEMENT
On distingue les variations de pince élastiques de celles dues à la géométrie.

Essieu avant : fig 78
Par rapport a la géométrie de suspension, la position de la rotule de direction sur le porte moyeu impose la position de la rotule en sortie de crémaillère
La position de la rotule de sortie de crémaillère de direction sur la figure est celle ne donnant pas de variation de braquage en débattement.
Il en serait de même pour l'Essieu AR si l'on veut déterminer la position ne donnant pas de variations de longueur de la transmission.
Si l'on s'écarte de cette position, on peut introduire des micro braquages de l'essieu avant:
•La hauteur de la crémaillère influe sur la pente de la courbe de variation par rapport â la verticale.
• L'entre axe des deux embouts de crémaillère influe sur la valeur même des micro braquages.
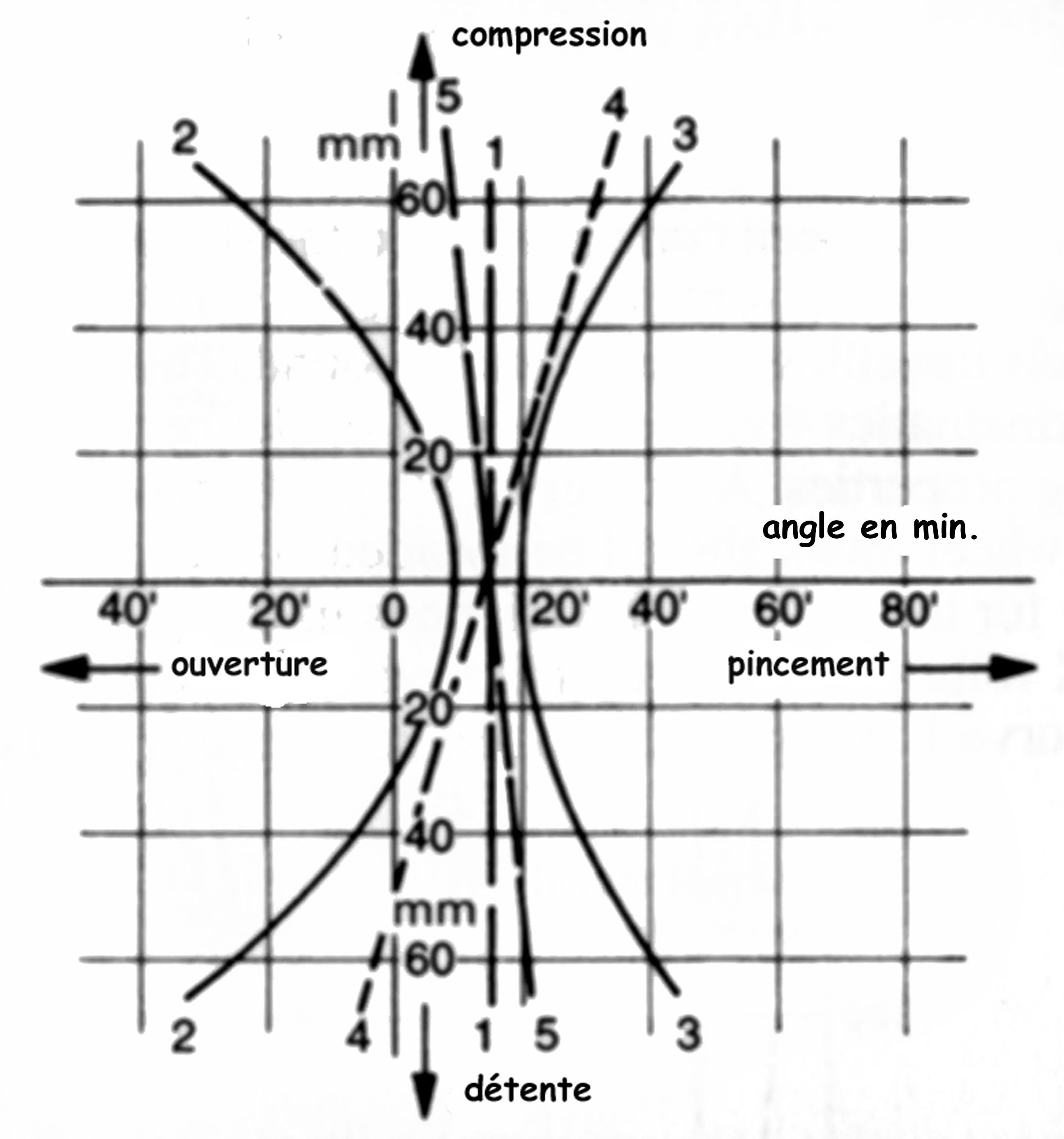
Pour une crémaillère placée en avant de l'essieu avant on a : fig 79
. Courbe 1 : crémaillère positionnée au théorique,
. Courbe 2 : crémaillère bien positionnée en hauteur mais trop courte ;
. Courbe 3 : crémaillère bien positionnée en hauteur mais trop longue;
. Courbe 4 : crémaillère en dessous du point théorique.
. Courbe 5 : Réglage souhaitable, légèrement au dessus du point théorique.
Bien noter que lorsque l’on dit que la crémaillère est trop longue, cela implique que les biellettes de direction sont trop courtes car nous sommes à parallélisme constant.
Une intervention sur les
variations de parallélisme ne peut se faire que dans la mesure où vous avez des
possibilités de réglage de hauteur, d’entraxe des embouts de crémaillère, de
longueur de biellette de direction ou encore de positionnement de la rotule de
direction sur le porte moyeu… !
3) GEOMETRIES DE SUSPENSION
Nous avons résumé en tableau les
différentes influences des géométries de suspension et surtout celles concernant
la position du point RC en hauteur et position par rapport au plan de roue.
On notera cependant que si la position de Rc peut se déterminer assez facilement
en statique ou en roulage ligne droite, il devient beaucoup plus complexe dès
que la caisse prend du roulis car à ce moment là interviennent différentes
flexibilités de suspension et de pneu qui changent fondamentalement la
trajectoire du point de contact de la roue au sol par rapport au plan de roue et
que les différences de charges sur les roues d’un même essieu déplacent la
position de l’axe de roulis de chaque essieu
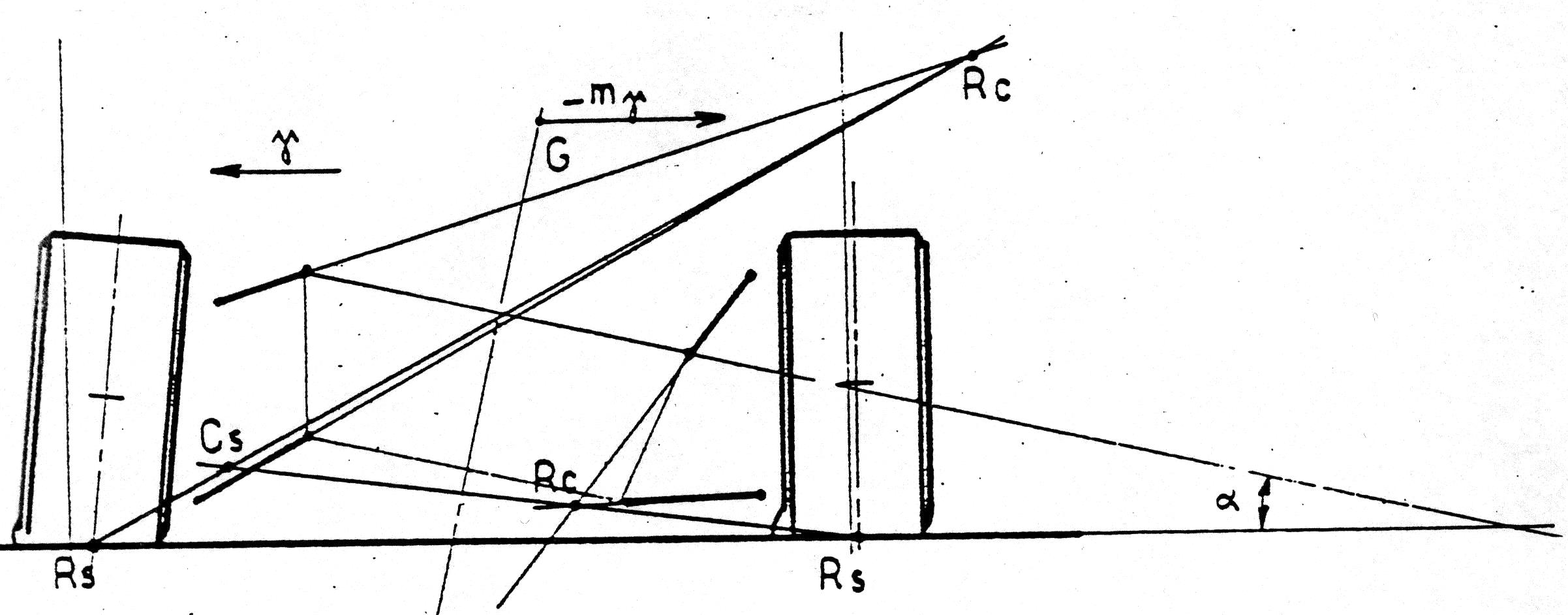
fig 80
Seules des mesures précises et des calculs complexes permettent d’approcher la connaissance de la position de ces axes. (accéléromètre tri axes ou gyroscope sur porte moyeu et caisse + capteurs d’efforts sur les éléments et les ancrages des suspensions, niveau laser pour les hauteurs de caisse !
EFFET DE CRIC
Selon les positions du centre de roulis, les efforts de ripage donnent naissance à des mouvements différents de la caisse : fig 81
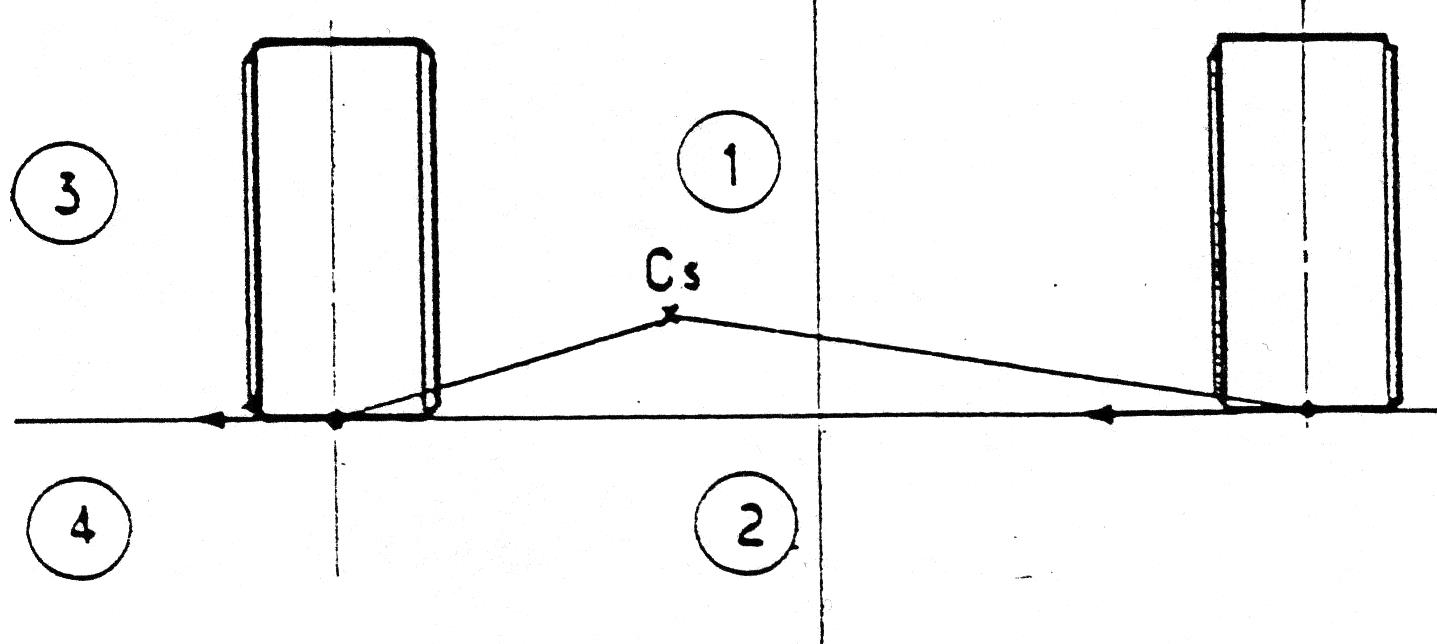
Dans la zone 1 (au dessus du sol, entre les roues), il y a anti-roulis naturel.
Dans la zone 2 (au dessous du sol, entre les roues), il y a accentuation du roulis.
Dans la zone 3 (au dessus du sol, extérieur à la voie), la caisse se soulève.
Dans la zone 4 (au dessous du sol, extérieur à la voie), la caisse s'écrase.
Mécanisme de l'effet de cric :
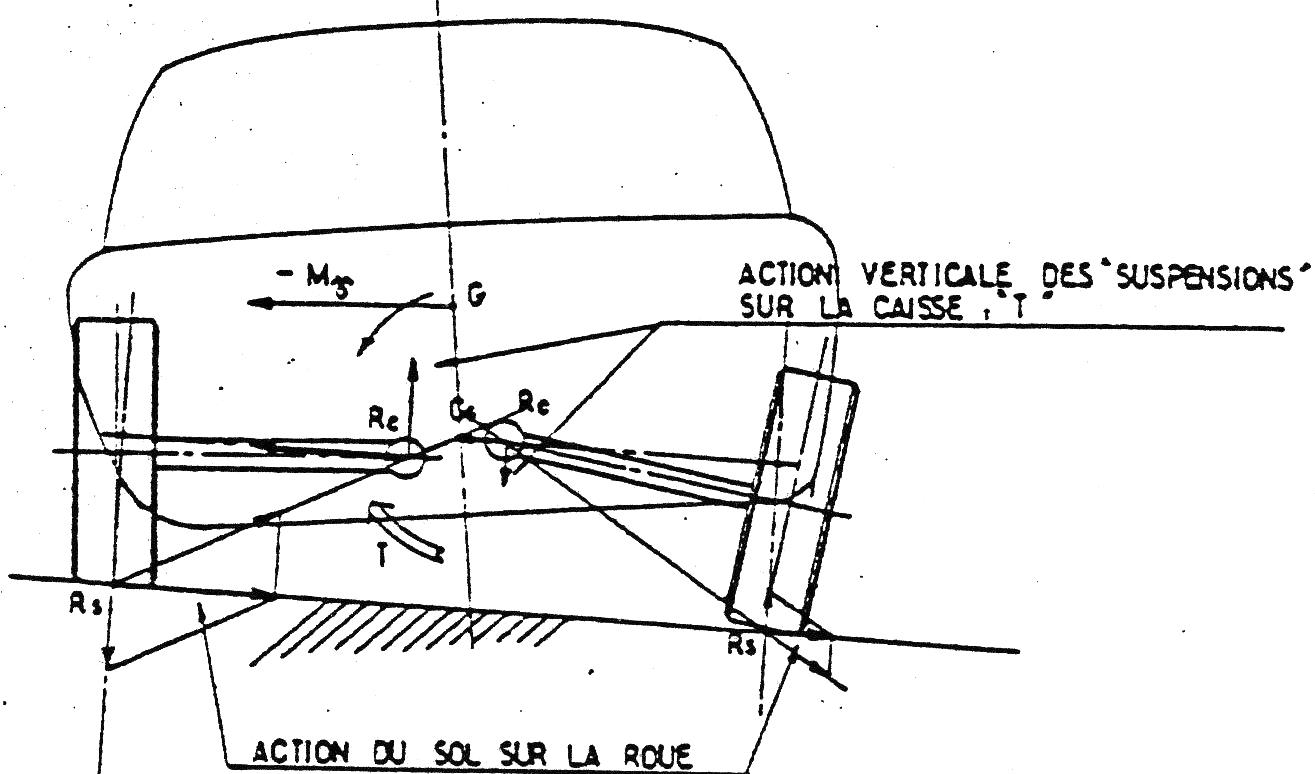
fig 83
Le schéma représente un train arrière de Renault8 à demi essieux oscillants. Le centre de roulis se trouve dans la zone 1, c'est à dire entre les roues et au dessus du sol (virage à droite). La décomposition des forces, dues à l'effort de ripage, montrent clairement le mouvement d' anti-roulis mais surtout le soulèvement de la caisse (force appliquées en sortie de boite de vitesses).
En guise de conclusion, nous avons voulu tenter de résumer l'essentiel des épures de suspension dans deux tableaux: l'un concernant les variations de carrossage, l'autre celles de voie. Dans ces deux tableaux, le paramètre variable est le point Rc.
Commençons donc par la varation de carrossage. Nous l'appelons ΔC. Comme le rappelle la figure n°3, A est la distance séparant Rc du milieu de la route considérée. En outre, l'angle de roulis sera appelé Θ
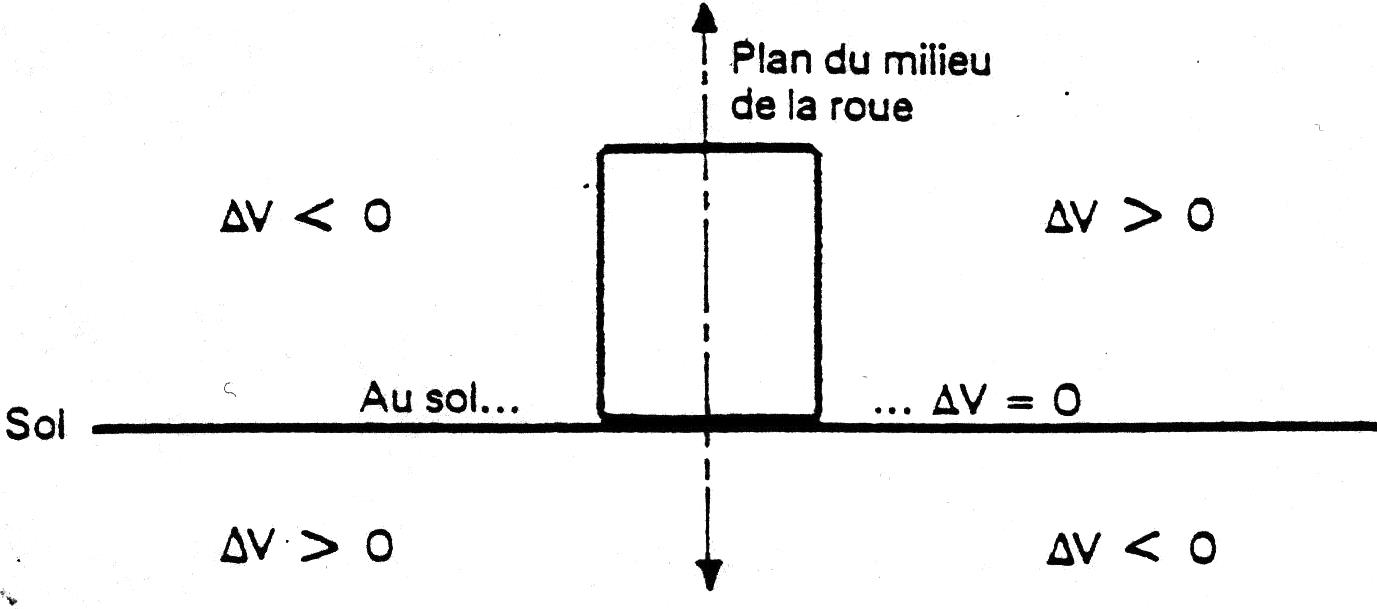
fig 84
Dans ce tableau résumant les variations de voie (en pompage), en fonction de la position de Rc dans les quatre secteurs déterminées par le sol et la verticale passant par le milieu de la roue, o,n remarque que lorsque Rc est au sol, ces variations de voie sont nulles (v désigne la variation de voie).
Le point Rc est déterminé par la distance « A » le séparant du milieu de la roue et par sa hauteur « h ».
|
Position de Rc (A) |
Pompage |
Roulis (angle Θ) |
|
Rc à l'infini A infiniment grand |
ΔC = 0 |
ΔC = Θ |
|
A plus grand que la 1/2 voie |
ΔC < 0 |
0< ΔC < Θ |
|
A = 1/2 voie |
ΔC < 0 |
ΔC = 0 |
|
A plus petit que la 1/2 voie Rc encore à droite du milieu de la roue |
ΔC < 0 |
ΔC < 0 |
|
Rc à gauche du milieu de la roue |
ΔC > 0 |
ΔC > Θ |